






本日は新しい開発の様子を少しご紹介!
技術のエキスパート・井谷のデスクを覗いてみると・・・
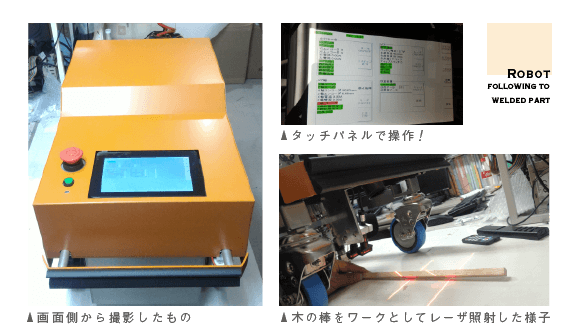
何やら、赤いレーザの光を発している車のようなロボットが。
“溶接の欠陥を検査する”ために
「溶接面をトレース(追従)して走る」ロボットを開発中でした!
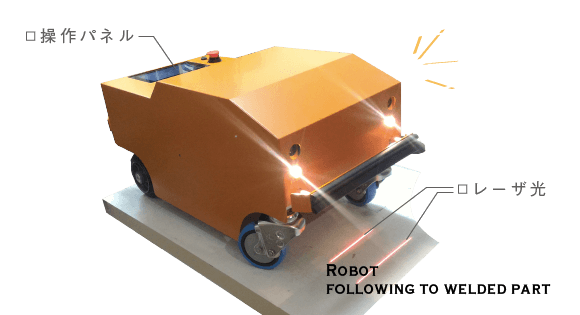
自動的に溶接部分を見つけ、追従して動きます!
まずはこちらの動画[0:09]をご覧ください

木の棒を動かした方向に、ロボットが寄ってきていますよね。
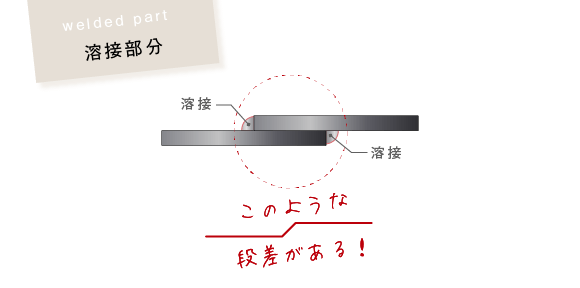
金属の溶接部分は下の図のように重なり合っていて必ず【段差】があります。
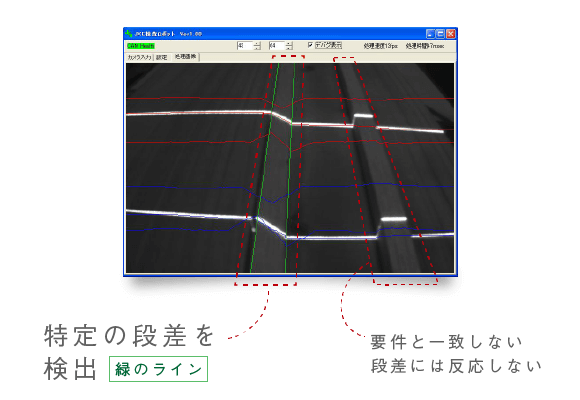
“レーザ照射&画像処理”により、その段差の中心を見つけ、なぞっていく仕組みを開発したそうです。
▼【参考】段差検出時の画像処理画面(緑色のラインが段差を検出した箇所)
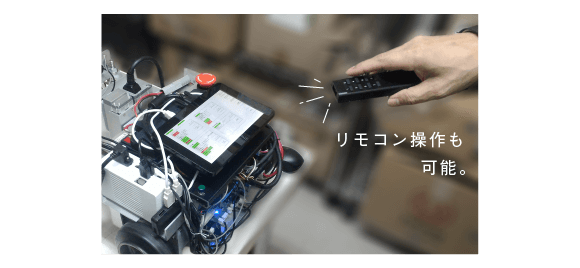
検査時以外は、リモコン操作で動いてもらう。
検査以外の時にロボットを移動させたいこと、ありますよね。
でも機械って結構重いんです。
こちらは約30Kgほど。
簡単に移動可能なようにリモコン操作でも動かせる仕組みにしているので、ロボットに自分で動いてもらって移動させることができるそうです。
でも機械って結構重いんです。
こちらは約30Kgほど。
簡単に移動可能なようにリモコン操作でも動かせる仕組みにしているので、ロボットに自分で動いてもらって移動させることができるそうです。
「特定の対象に追従して、機械を動かしたい」などご要望がございましたら、お気軽にこちらからご質問ください。
画像処理に関連する他の記事もご覧ください
【位相シフト×空間コードで3次元位置をはじき出す】 >
【年輪方向判定装置 稼働スタート!】 >