1. より高精度な3次元画像処理
今回は・・・
のご紹介です。
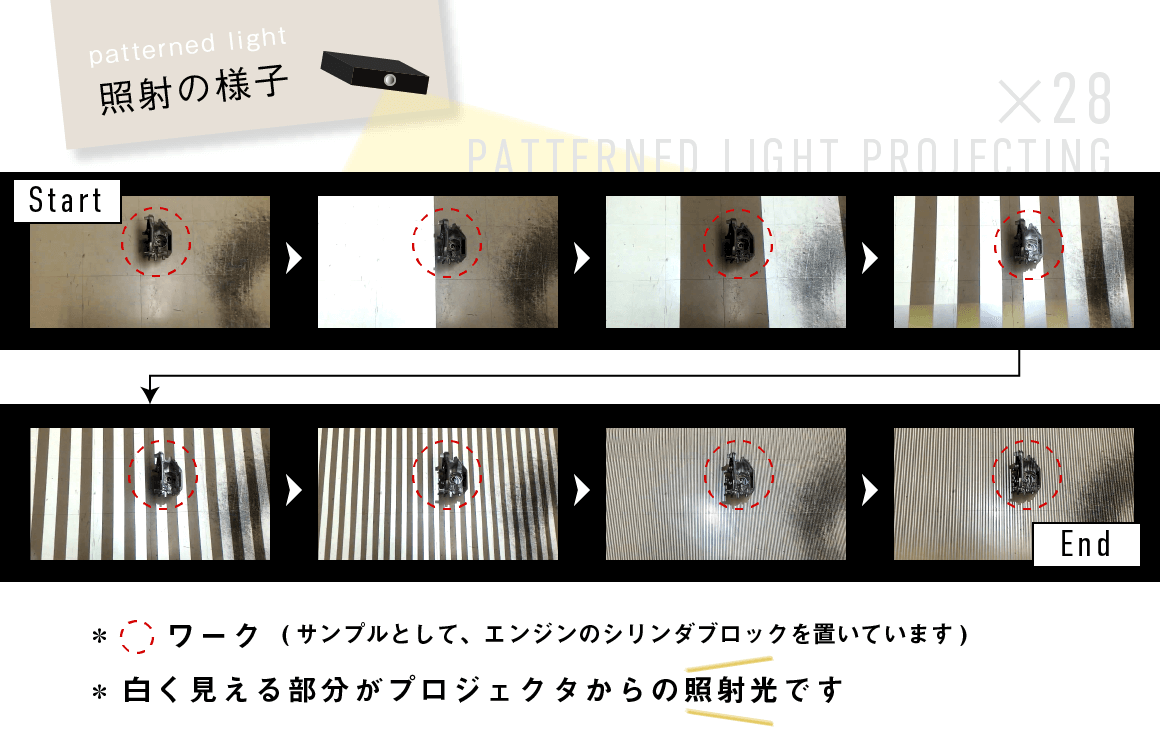
まずは、こちらの動画をご覧ください!(※眼がチラチラするのでお気をつけください)

パラパラと連続で光が照射されていますよね。
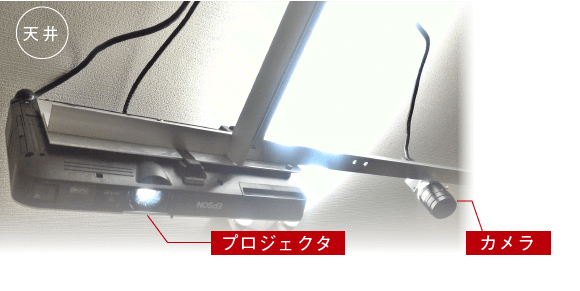
ワークの上部には、カメラとプロジェクタがあり、全部で「28パターン」の光を照射してそれをカメラで撮影しているそうです。それから画像処理をして高精度な3次元位置を特定します。
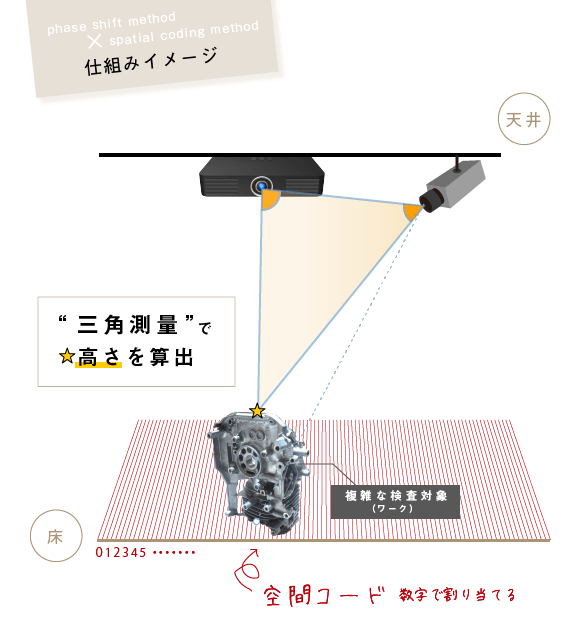
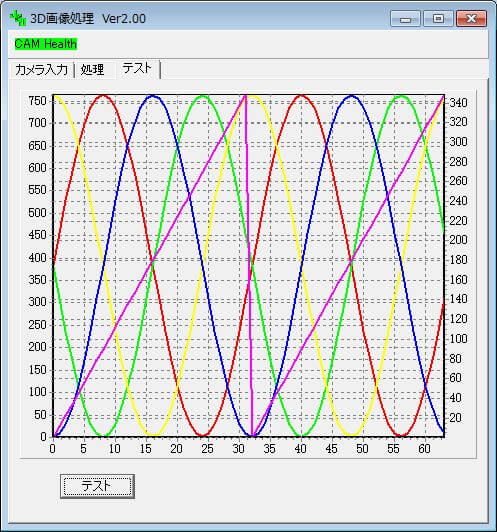
2. しくみは「位相シフト法」と「空間コード法」の“良いとこどり”
- 位相シフト法
- 空間コード法
★【位相シフト法】だけだと → 精度は良いけれど高さ情報が分からず、
★【空間コード法】だけだと → 高さは分かるけれど精度があまりよくない、とのこと。
ですがこの2つの方法を組み合わせることでお互いの短所を補い合うことが出来ます。
少し仕組みについてご紹介しますと、パターン照射してそれをビット毎に割り当てることで空間コードを割り出し「三角測量」を使って高さを導きます。
よって精度の高い「位置(X、Y、Z座標)」と「傾き(ロール・ピッチ・ヨー)」までを算出できるそうです。
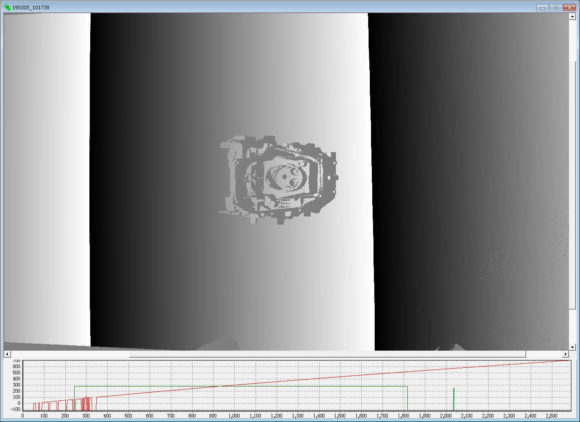
3. 参考画像
▼参考:こちらは、シリンダブロックを空間コード化した画像
以上、新しい開発のご紹介でした。
4. スライド資料ダウンロード
[高精度3次元画像処理]について紹介したスライド資料はこちらからご覧いただけます。
![[ダウンロード]スライド資料はこちらから【位相シフト法×空間コード法による「高精度3次元画像処理」】](https://jsdkk.com/home/wp-content/uploads/2019/03/c428256863e8a75fa70fc0bac187129a.png)
日本システムデザインでは、ハード(基板)の設計からメカ制作までまるっと制作できます。
オーダーメイドなのに小回りがきくから、例えば【基板を小さく】【市販物よりコストカット】などお客様に好評いただいております。
『こんな開発はできるの?』や
『コストはどのくらいかかる?』などご質問・ご要望などをぜひお気軽にお聞かせください!

ちょうど「空間コード法」が専門家の間で言われ始めた頃だそうで、「製造ラインでピッキングを行うために」空間コード法を使って開発したそうです。
当時は道具(カメラなどメカ)も今より性能が良くはなかったですし、今よりも難しい開発だったかも・・?
マイクロマウスとは、世界で歴史のあるロボット競技。
マイクロマウスって何?という方はこちらもぜひご覧ください!