平素は格別のお引立てを賜り誠にありがとうございます。
2023年のゴールデンウィーク休業日が決定いたしましたので、お知らせさせていただきます。
2023年のゴールデンウィーク休業日が決定いたしましたので、お知らせさせていただきます。
休業日 2023年4月29日(土)~2023年5月7日(日)まで
休業中はご迷惑をおかけいたしますが、何卒ご了承のほどよろしくお願い申し上げます。







日本システムデザイン株式会社は、2023年2月1日で38周年を迎えました。
※都合で1日早く投稿させていただいております
これもひとえに皆様のおかげであり、深謝申し上げます。
(皆様とは、お客様、ご支援・ご協力いただいた方々、
株主様、地域の皆様など、関わりのあった方すべてでございます)
39年目も、これからと変わらず
「社会に貢献できる ものづくり
(組み込みマイコンのシステム開発)」ができるよう
邁進していきますので
何卒よろしくお願い申し上げます。
先日、弊社社長から
「ChatGPT(チャットジーピーティー)※」という
面白いAIツールがあるよ、と教えてもらいまして。
早速「どんなことが出来るのか」触ってみたので、
今日は試してみた結果をシェアさせていただこうと思います!


 ▲ ChatGPTログイン前の画面
▲ ChatGPTログイン前の画面
調べてみますと、、、
米国時間の2022年11月30日に公開されたようです。
つい先日公開されたばかりだったんですね。
公開から6日間で100万ユーザーを突破したとのことで、、
OpenAIのCEO、Sam Altman氏が
12月5日にツイッターでこのようにツイートされています。
↓↓↓↓↓↓
ChatGPT launched on wednesday. today it crossed 1 million users!
— Sam Altman (@sama) December 5, 2022
使ってみるにはメールアドレス(Googleアカウント)&電話番号での登録が必要でしたが、早速登録してみました。
(ちなみにGoogleアカウントでの登録はササっと楽でした!)
登録後、ログイン後の最初のページに、きちんと「制限事項」として
“誤った情報を生成することがある”と記載があります。
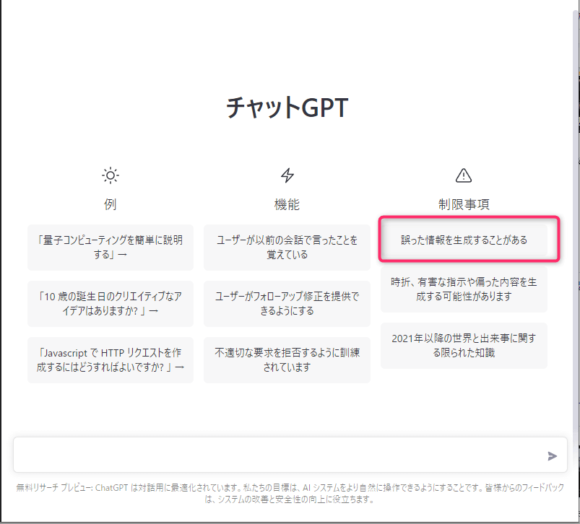 ▲ログイン後の画面(日本語に翻訳した状態)
▲ログイン後の画面(日本語に翻訳した状態)
ですので、完全に信じるのは危険ということですね。
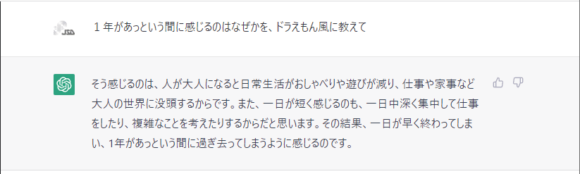
実際、面白い回答をくれたケースもありましたので後で紹介いたします。
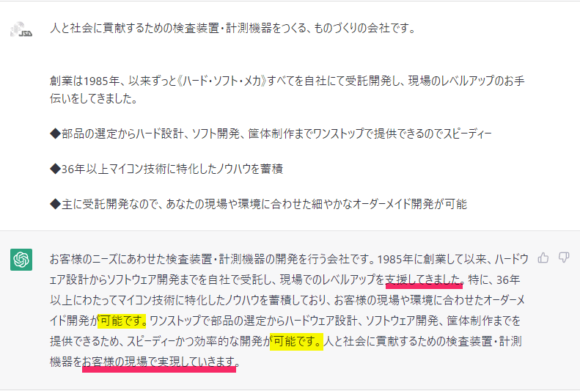
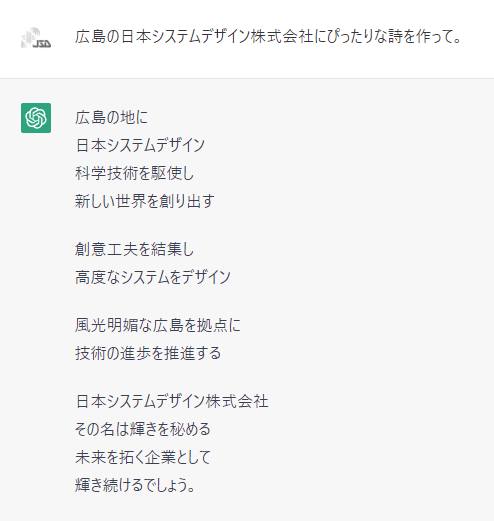
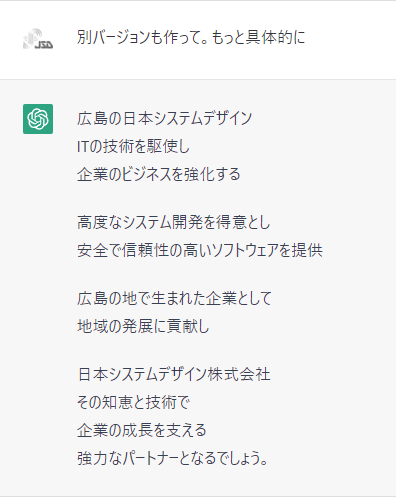
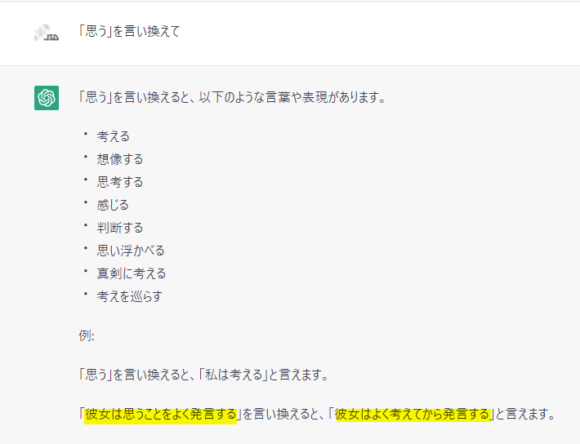
会社の説明文を入れてみました。
実は、質問を入れる前にリターンキーを勢いで押してしまい送信されてしまったのですが、文章を要約してくれた?みたいです。
文章的には、「~可能です。~可能です。」と同じ表現が続いてしまっているので自然にならず少し残念。(※黄色背景)
ですが、「お手伝い」→「支援」と少しキリッとしたフォーマルな伝え方に修正されていたり、「お客様の現場で実現していきます」という表現のくだりは「多少参考になるかな」と感じました。(※赤ライン)
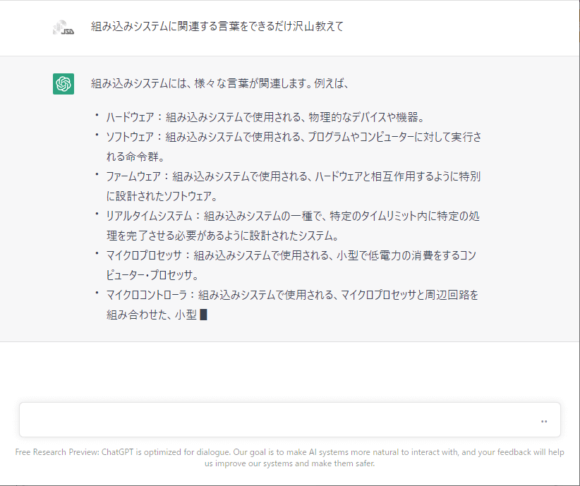

[network error]となってしまいました。
何度か再トライしてみたのですが、「沢山教えて」と言ったのが悪かったのかどうしてもエラーに。今まで出力された文字は消えてしまうのが残念でした。
せっかく教えてくれてた文章は途中までで良いので残ってくれると助かるな、と思いました(無料ですし決して文句ではないです)。エラーはこちらの環境の問題なのかもしれません。
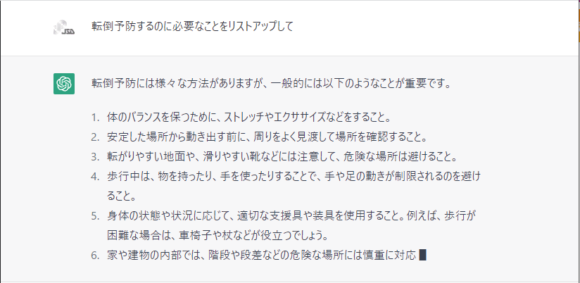

以上、シェアさせていただいた以外にも色んな質問してみたのですが楽しかったです。
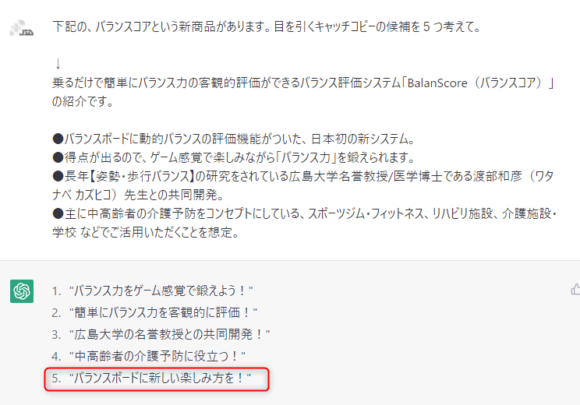
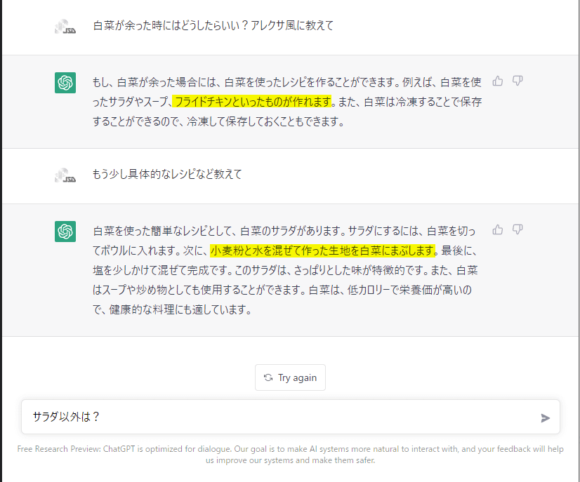
最後に間違った答えが。堂々と言い切ってるところが面白くも可愛いですね。
以上、最後までお読みくださりありがとうございました。
— P.S —
今年最後の記事となりそうです。
来年2023年も役に立つ情報発信をしていけたらと思っています。
皆様、どうぞ良いお年をお過ごしください。

12月に入り、広島でも朝夕はだいぶ冷え込んでまいりました。
平素は格別のお引立てを賜り誠にありがとうございます。
年末年始の休業日が決定いたしましたのでお知らせさせていただきます。
休業中はご迷惑をおかけいたしますが
何卒ご了承のほどよろしくお願い申し上げます。

平素は格別のお引立てを賜り誠にありがとうございます。
夏季休業期間が決定いたしましたのでご連絡させて頂きます。
休業中はご迷惑をおかけいたしますが、
何卒ご了承のほどよろしくお願い申し上げます。




日本システムデザイン株式会社は、2022年2月1日で37周年を迎えました。
これもひとえに皆様のおかげであり、深謝申し上げます。
(皆様とは、お客様、ご支援・ご協力いただいた方々、
株主様、地域の皆様など、関わりのあった方すべてでございます)
38年目も、これからと変わらず何卒よろしくお願い申し上げます。
37周年を記念し
会社紹介動画を新たに制作し公開しました!
ぜひご覧いただければ幸いです。
↓ ↓ ↓
【そうだ!組み込みシステムで無人化しよう】 [01:59]

新年、明けましておめでとうございます。
旧年中は格別なご高配を賜り、誠に有難うございました。
2022年は創立から37周年を迎える年となります。
現在、本年に予定していることとしましては
の発売がございます。
準備が整った際にはホームページ上で発表させていただきますので
何卒よろしくお願い申し上げます。
2022年が皆様にとって佳き年でありますようお祈り申し上げ、
年頭のご挨拶とさせていただきます。
* * * P.S * * *
年始からここ広島でもオミクロン株感染が増加している状況であったり
世界的な半導体不足や電子部品も
なかなか手に入らない状況ではございますが、
本年も「軸」は変わりません。
世の中の役に立つ検査装置・ロボットを提供することで
“ 現場のレベルアップ ” の手助けを 最短距離で できますよう尽力して参ります。
* * * * * * * * * * * * * * *

11月も後半となり、広島でも朝夕はだいぶ冷え込んでまいりました。
平素は格別のお引立てを賜り誠にありがとうございます。
年末年始の休業日が決定いたしましたのでお知らせさせていただきます。
休業中はご迷惑をおかけいたしますが
何卒ご了承のほどよろしくお願い申し上げます。