






製造ラインや工場・物流センターなどのあなたの現場で、
こんな悩みありませんか?
こんな悩みありませんか?
- 将来的に無人化・省人化して、人手不足を解消したい
- 単純作業の効率化を図りたい
- ワークが重たく重労働なため、人にかかる負担を減らしたい
- 各工程をスピーディーにしてコストパフォーマンスを向上させたい
- 人による事故・ミスを防止したい
その他にも・・・
それなら、JSDのピッキングロボット導入で解決できるかもしれません!
開発の一例
日本システムデザイン株式会社では、「TOF方式」や、自社開発の「位相シフト方式」でのピッキングロボット開発実績があります。
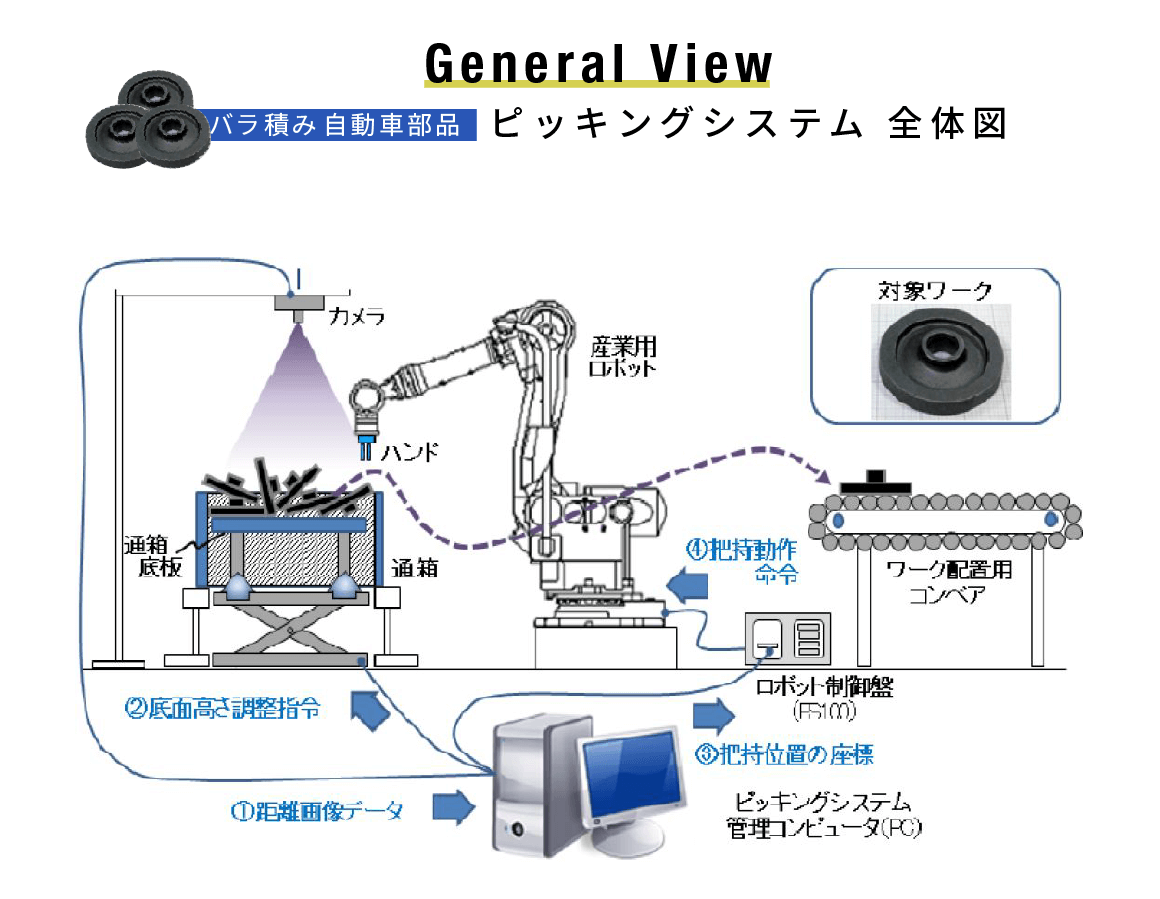
「バラ積み自動車部品」ピッキングシステムの例では、
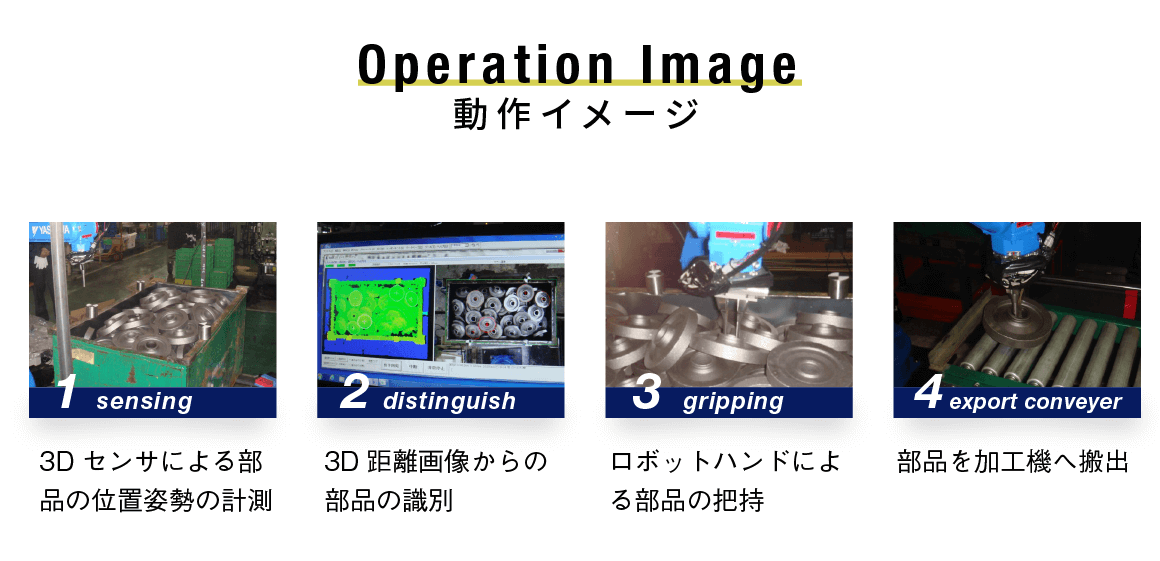
距離計測カメラを使用し、画像処理でワークの位置と傾きを検出。6軸ロボットに指令を出します。
「バラ積み自動車部品」ピッキングシステムの例では、
距離計測カメラを使用し、画像処理でワークの位置と傾きを検出。6軸ロボットに指令を出します。
▲クリックで画像を拡大できます
▲クリックで画像を拡大できます
▼ 動画で実際の動きをチェック
オーダーメイドで精度を追求[開発こぼれ話]
ピッキングシステムでは、ロボット側に自分の位置を教えてあげる必要があるので、
最初にこのような紙をワーク上に置いてロボットの基点を設定します。
最初にこのような紙をワーク上に置いてロボットの基点を設定します。
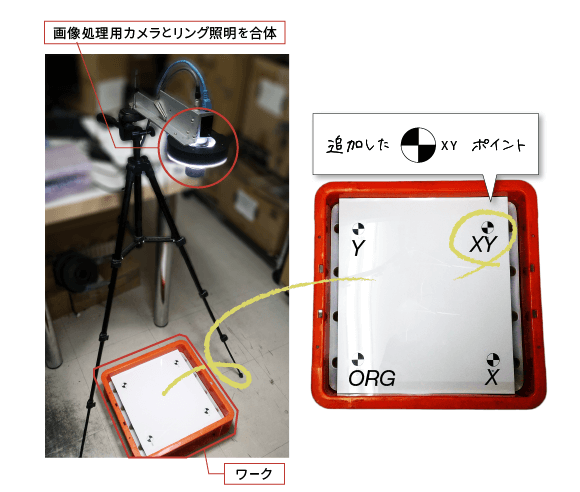
当初、この円形のマークは「X」「Y」「ORG」の3点だったそう。
開発中、カメラが真っすぐ床と平行に取り付けられていない場合、ほんの僅かですが把持するポイントがズレてしまうことが判明。(カメラから得た画像が正方形でなく台形になってしまうと誤差が出てしまうことが原因)
これを防ぐために、最初は無かった「XY」という4点に変更してプログラムを改善することでより精度の高いピッキングを実現しました。
このように、JSDではオーダーメイドだから素早く改善対応できる、装置に想いをこめられる技術者がいます。
資料ダウンロード

◆ 関連記事
【位相シフト×空間コードで3次元位置をはじき出す】では、「28パターン」の光を照射することで高精度な3次元位置を特定するセンシング技術についてご紹介しています。ぜひこちらもご覧ください!