





目次
- マイクロマウスとは
- マイクロマウス競技について
- マイクロマウスの歴史
- 日本システムデザイン(株)とマイクロマウス
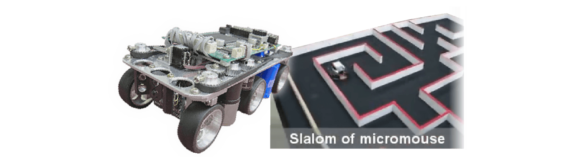
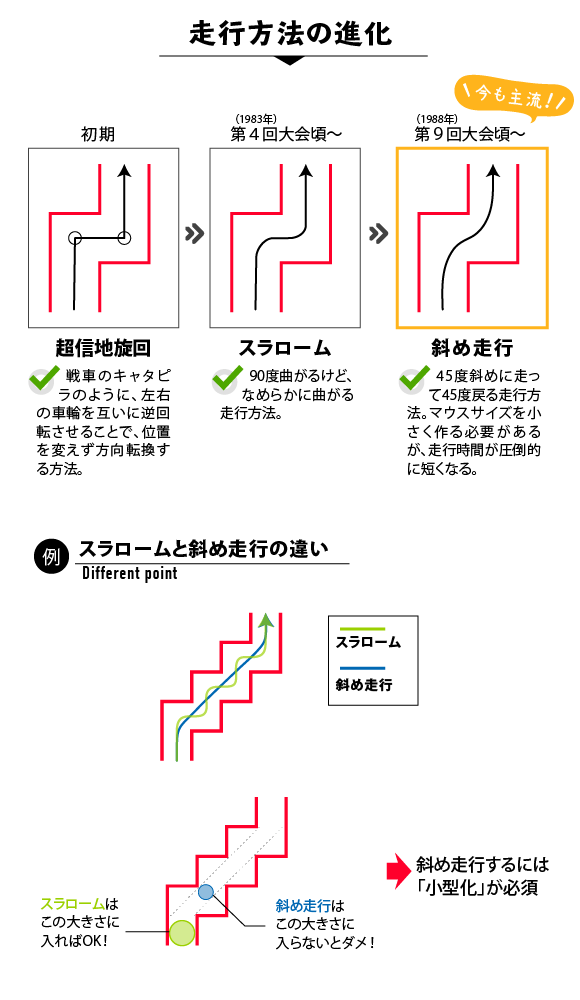
4-2 スラローム走行について
4-3 井谷の成績一覧
4-4 「マイクロマウスの歩んだ路」
4-5 足立法の冊子
4-6 アジア太平洋博覧会 郵政パビリオン
4-7 つくばチャレンジ
4-8 代表・麥田の優勝ストーリー
4-9 マウスに興味ある方へメッセージ
1. マイクロマウスとは

1-1. 概要
- Word
- マイクロマウス(マウスと略して呼ぶこともあり)
- 英語
- Micro mouse
【マイクロマウス】という言葉、あなたは耳にしたことがありますか?
一般的にはあまり聞かない言葉ですよね。
ですが実は、世界一歴史があるロボット競技の名前なのです。
その走るスピードの速さに魅了されたり、アイデアを実現するためには高い技術力が必要だったりと、まさに「ロボットの甲子園」のようなもの!
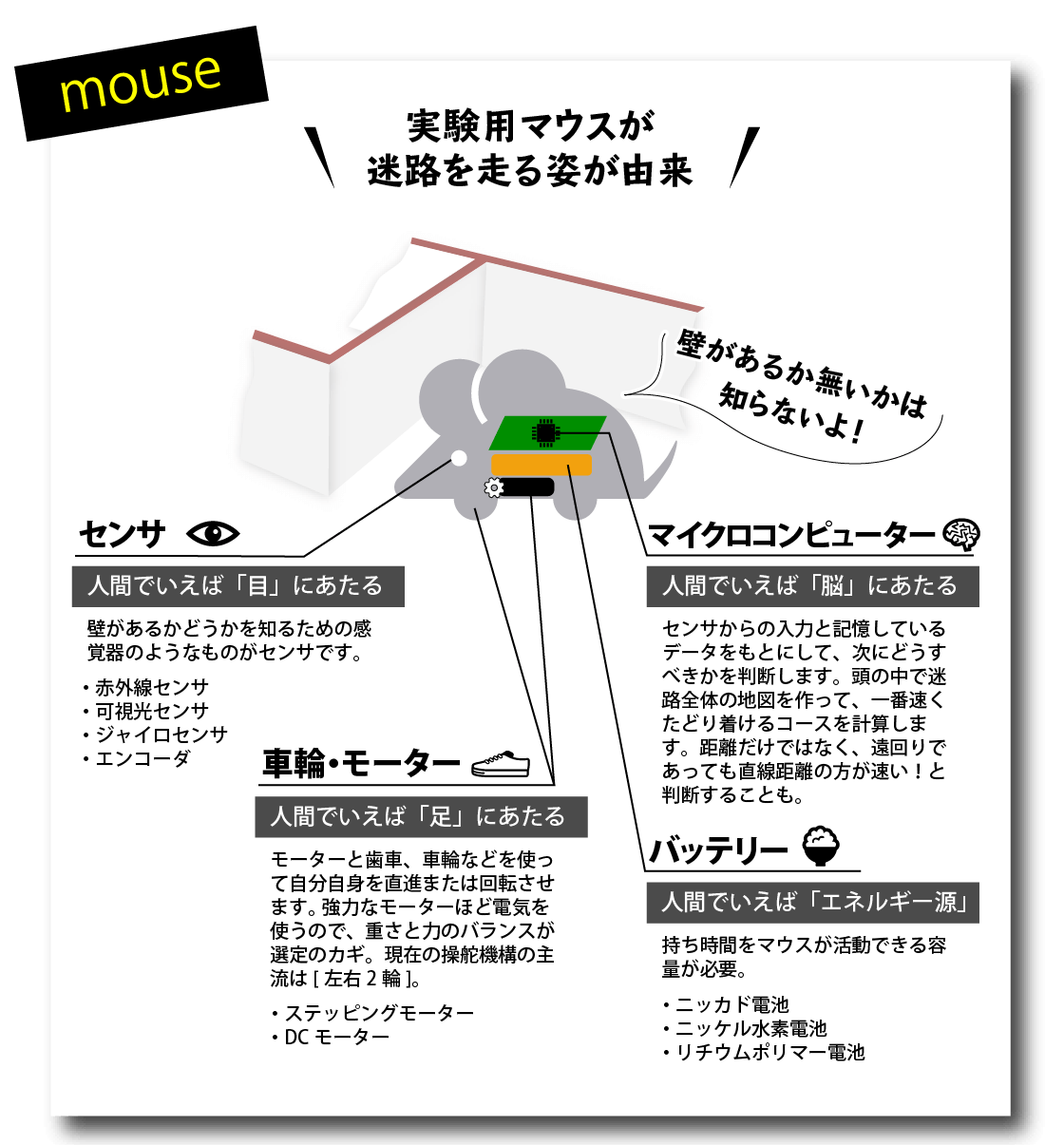
マイクロコンピュータ※を搭載した、
自律制御で未知の迷路を走りゴールするまでのタイムを競う
ロボットおよびロボット競技 のこと。
マイコンを含む制御システムを「マイコンシステム」あるいは「組み込みシステム」(エンベッドシステム:embedded system)という。
つまり、自分の力で迷路を走りゴールする、とても賢い小型ロボットなんです!


※迷路のゴールは真ん中です。
<参考:2011年度優勝マウス動画>
予想以上に早くて驚きませんか?
迷路の探索走行が終わりスタート地点に戻った[1:24]からのスピードが驚きです!しかも、ゴールした後に自分でスタート地点に戻ってくるあたりも、クスっと笑えて面白いですよね。
1-2. マウスのイメージ
1-3. 迷路の一例

ベースがシンプルで面白く、高い技術が必要なので人材育成にピッタリ。
【組み込みシステムの技術として個人が全体をシステム設計して、メカからソフトウェアまできちんと作ることのできるギリギリのサイズ】と言われています。

- 何年間も続けている人がたくさんいること。
- スピードがあり、人間の本能的に面白く魅力があること。
- マイクロマウスに関わって「やって良かったと思っている人」「その技術を職業にした人」がいること。
これらが証明するように、きっとこれからも。
組み込みエンジニアの人材育成に役立っていく存在になるのではないでしょうか?

探索走行が終わった後の、ゴールまで猛ダッシュするスピードの速さにはビックリしたよ!もっと沢山の人に知ってもらいたいな。
2. マイクロマウス競技について

2-1. 主催
2-2. 変わらない基本コンセプトは、「迷路情報は与えない」
2-3. 競技種別
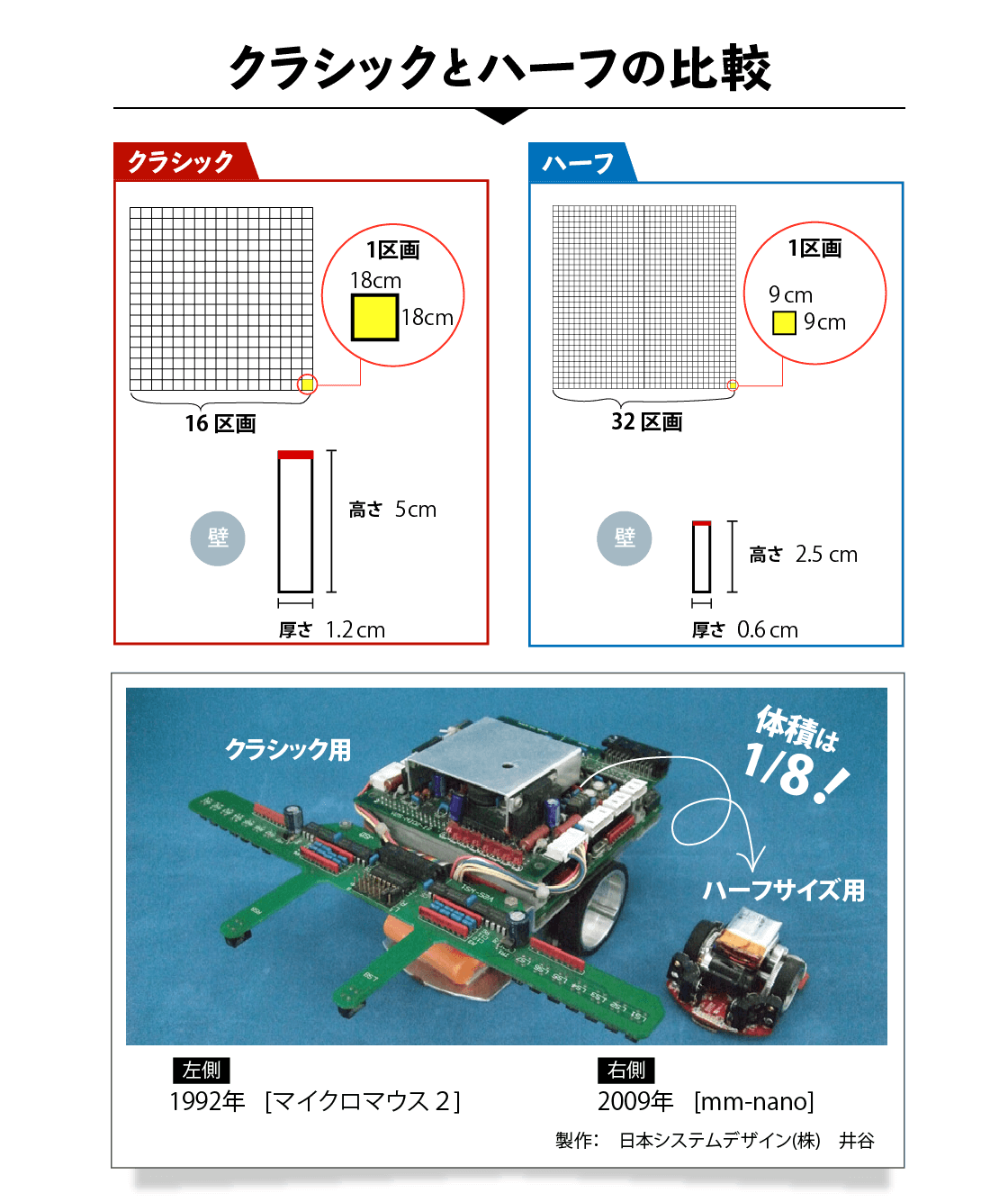
- ● マイクロマウスクラシック
- 区画の1辺=18cmの迷路を使用。
第1回大会からの従来サイズ。 - ● マイクロマウス(ハーフサイズ)
- 区画の1辺=9cmの迷路を使用。
2009年から正式に新設された従来の1/2サイズの競技。
| エキスパートクラス | キャリア豊富な方、海外トップクラスの実力者向け |
|---|---|
| フレッシュマンクラス | 初心者、まだ完走したことが無い方向け |
予選・クラス分けを無くして、以下のように競技名が新たに整理されました。運営日を3日から2日に減らし、多様な会場の選択や運営を柔軟にすることで『将来的に多くの観客を集めるため』との意向です。
<下記3種目に整理>
- ● マイクロマウス競技
- 今までの「マイクロマウス(ハーフサイズ)競技」のこと。つまり、区画の1辺=9cmの迷路を使用する競技。
- ● クラシックマウス競技
- 今までの「マイクロマウスクラシック競技」のこと。つまり、区画の1辺=18cmの迷路を使用する競技。
- ● ロボトレース
- 白いラインの周囲回コースをトレースして走り、タイムを競う競技。(マイクロマウス競技と一緒に開催される)

2-4. 競技ルールの基本
<公益財団法人ニューテクノロジー振興財団 ホームページより抜粋> 2013年8月1日改定時点のもの
- マイクロマウス
- マイクロマウスは、自立型※であること。
燃焼を利用したエネルギー源はNG。[selfcontained]制御装置と駆動源を内蔵しているもの。外部からケーブル等によるエネルギーの供給を受けずに移動できること。 - マイクロマウス(大きさ)
-
クラシック 1辺25cmの正方形に収まらなければならない ハーフサイズ 1辺12.5cmの正方形に収まらなければならない - どちらも、高さの制限はなし。
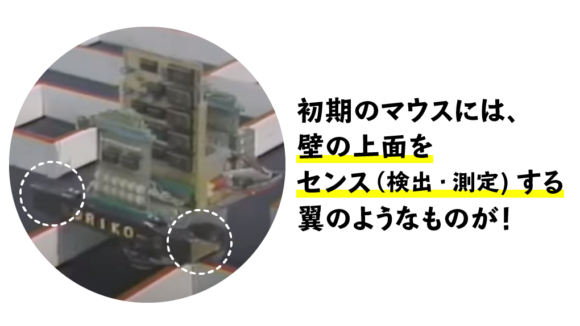
- 迷路の区画サイズよりマウスのサイズ規定が大きい理由は、壁を越した上部にセンサをつけることがあったためです。最近はほぼありません。
- 迷路の色
-
側面 白 □ 壁の上面 赤 ■
※始点・終点区画は黄 ■床面 黒 ■ - 迷路サイズ
-
クラシック 【区画のサイズ】 18cm×18cm
【区画数】 16×16区画
【壁の厚さ】 1.2cmハーフサイズ 【区画のサイズ】 9cm×9cm
【区画数】 32×32区画
【壁の厚さ】 0.6cm - 迷路情報
- 迷路に関する情報をマイクロマウスに入力してはならない。
- 持ち時間
-
クラシック 10分間の持ち時間、5回まで走行することができる
(場合によっては、持ち時間7分、5分とすることがある)ハーフサイズ 最大15分間の持ち時間として、競技会ごとに定める。
原則5回まで走行することができる。 - その他規定
-
競技中、タイヤについた埃やごみを粘着テープなどで取り除くことができる。
(※ちなみに海外ルールでは減点となります)
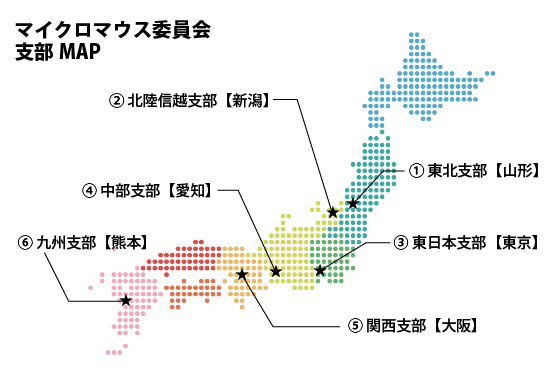
2-5. 地区大会
全国大会より先行して(7月~10月ごろ)地区大会が開催されます。
2018年度より全日本大会に出場できるのは、その年度の各地区大会の完走記録保持者となります。
各地区大会は6つの支部で運営されています。(※2018/04時点)支部はその時々で新設されたり無くなったりするそうで、以前は北海道や中四国にも存在したそうです。
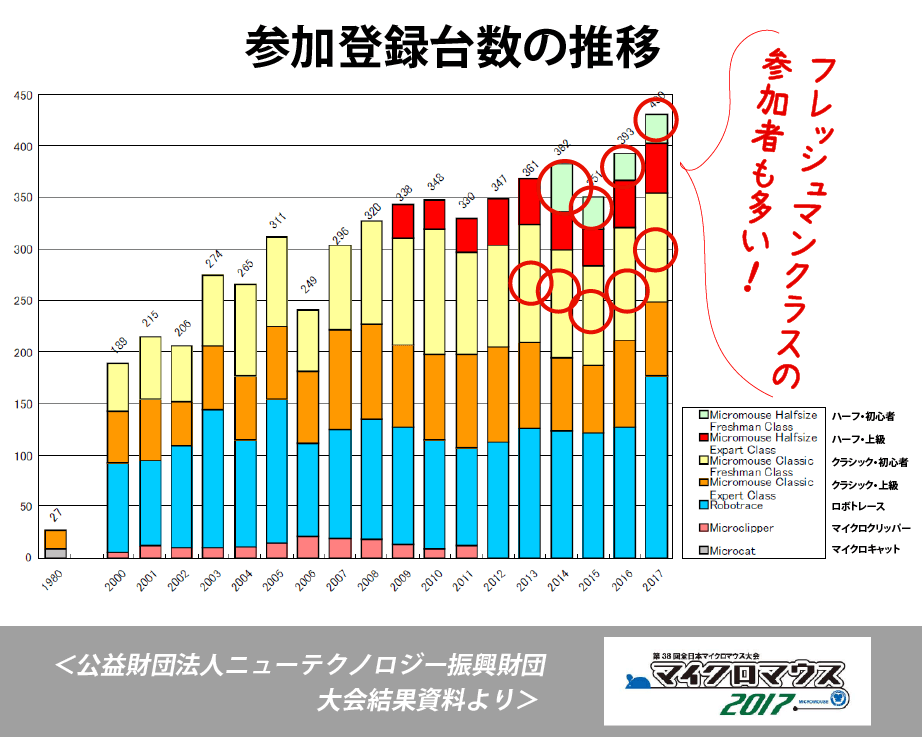
今は部品が小型化したことで初心者でもハーフサイズを作ることが昔ほど難しくなくなってきたから、ハーフサイズが主流になっていくんだね。十数年先では、さらに小さな迷路での競技が開催されるのかなぁ?
イギリスやシンガポール、台湾など海外でのルールは、日本と違って「スコア方式」なんだって。
日本はスタートからゴールまで一番速く走ったタイムを競うんだけど、海外ルールでは“マウスに触ると減点されたり、探索走行の時間も加味されたり”トータルスコアで順位を決めるらしいわよ。
日本ルールで優勝しても海外ルールで優勝できるとは限らない、ということなのね!

2-6. 「ロボット技術を議論し合うオープンな環境」と「賞金」
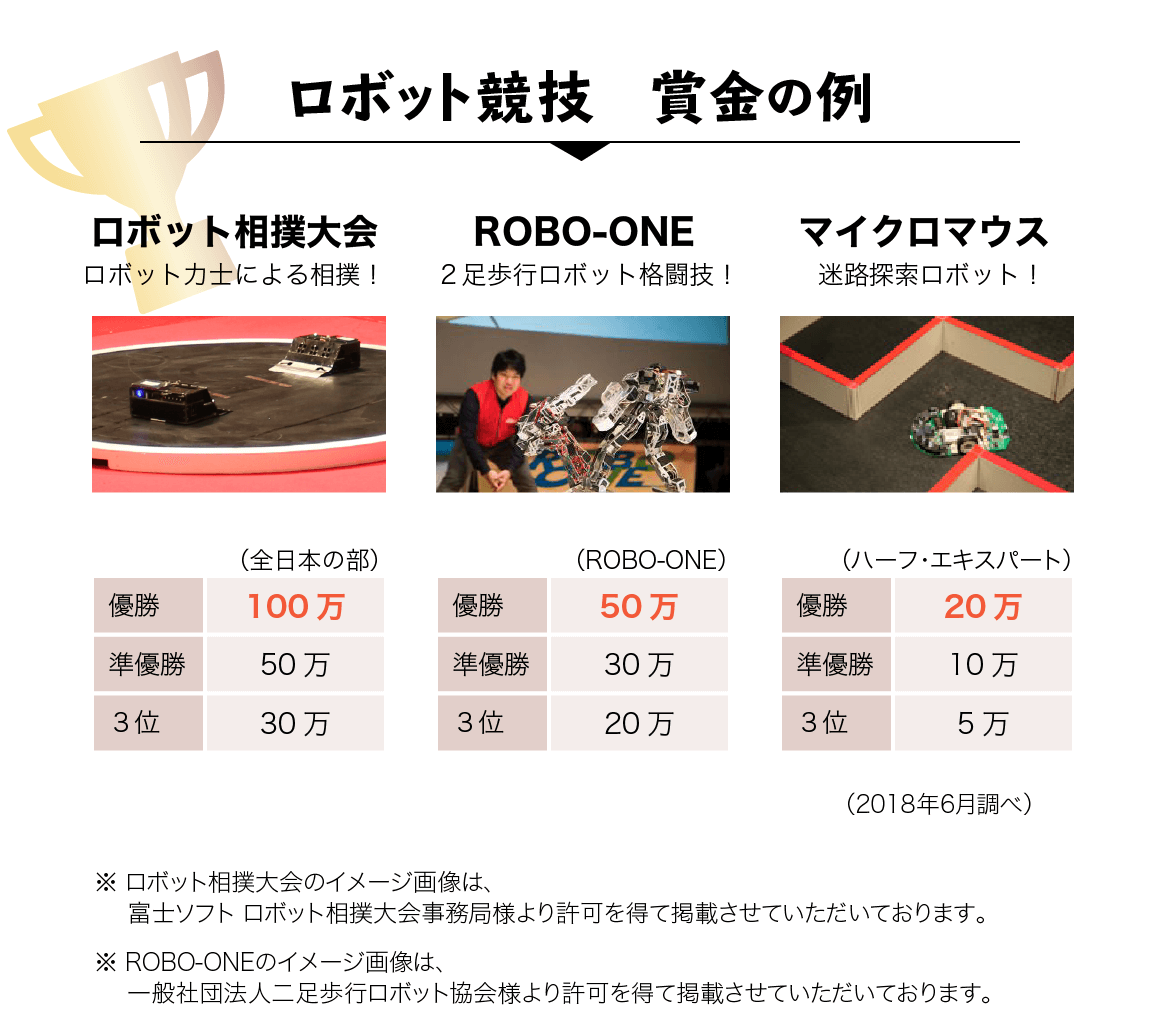
その中でマイクロマウスでは、優勝者などに“研究奨励金” が支給されますが、昔からそんなに高くありません。
現在マウスでは、ハーフ(エキスパートクラス)で優勝者に20万。クラシックでは10万となっています。(2018年6月調べ)
そのため、賞金目当ての技術者は少なく
「自分が作ったロボットはすごいんだぞ」
と自慢できるところに一番の“醍醐味”があるそうです。
そして、技術はオープンに話されます。例えば参加者同士で、どのモータを使ってどんな仕組みで作ったのか教え合うとのこと。
あまり注目されない賞金について、あえて比較してみたいと思います。
例えば、【ロボット相撲大会】は全日本の部で優勝/100万、準優勝/50万、近年始まった、2足歩行ロボット格闘技大会【ROBO-ONE】(ロボワン 2017.02~)では、優勝/50万、準優勝/30万となっています。
また、2018年に開催される国(経済産業省とNEDO)が主催のWRS※では、それぞれの種目で1位が1,500万や1,000万!!桁が違いますね!
(※ World Robot Challenge 2018。2018はプレ大会の位置づけで2020年に本大会予定。)
でも、賞金の高いロボット競技が悪いわけでは決してなくってね。例えば、ロボット相撲大会でも公開練習会や大会後の練習会を行っていたり、大会の中に相談コーナーを設ける・試合後にロボットを解体して見せるとか「選手同士、先生同士の交流」も積極的に行っているんだって。
どの競技も、共通の目的で互いに切磋琢磨しながら技術を磨いていくことができたら良いわね!
3. マイクロマウスの歴史

歴史について、あまり知られていない話も含めてご紹介します。
今年(2018年)は、1980年マイクロマウス大会の第1回から数えて39年目、マイクロマウス大会の前身である1979年の「全国ロボット大会」から考えると40年目にもなります。

実は、マイクロマウス大会は、
【世界で最も歴史あるロボット競技会※】と言われているんです。
※幅広い参加者による大会が開かれているものとして
そして毎年必ず開催されていることも、貴重なことですよね。
海外ではイギリス、アメリカ合衆国、シンガポール、大韓民国、台湾などで開催されています。
国内で開催される全日本マイクロマウス大会は、海外の高い技術をもっているロボットも参加するため(例えば、2016年の海外参加者は43台、2017年は45台)事実上は【世界大会と同じ】と言われているそうです。
3-2. マイクロマウス歴史年表
| 1977年 |
|
|---|---|
| 1978年 |
|
| 1979年 |
■田代康典(たしろ ひろふみ):
『マイクロマウス育ての親』で、マイクロマウス大会を第1回目から中心となって運営。2016年8月2日ご逝去。財団法人ニューテクノロジー振興財団の事務局長を長年務める。2016年度のマイクロマウス全国大会より「田代賞」が創設された。 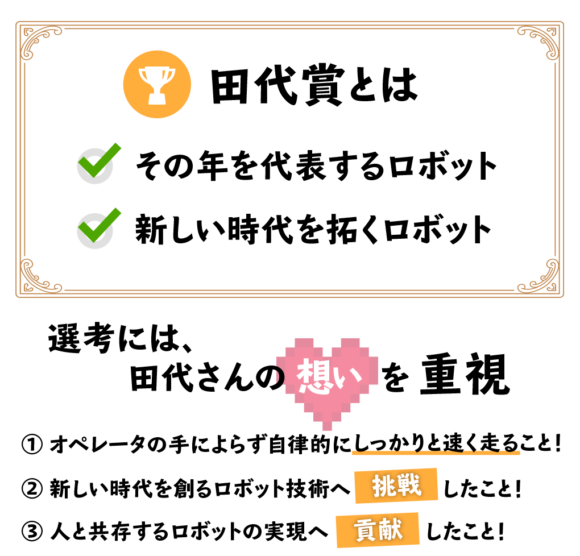
■油田信一(ゆた しんいち):
芝浦工業大学 SIT総合研究所 特任教授(2018年3月時点)日本のロボット研究者。工学博士(慶応義塾大学)。筑波大学名誉教授でもある。第1回ロボット全国大会で「山彦」を披露して以来、マイクロマウス競技会実行委員長として運営指導。2018年現在、ニューテクノロジー振興財団の会長。
|
| 1980年 |
◆◇こぼれ話①◆◇
実は幻の完走者が存在!それも電子工学院の学生さんで、大会2~3日後に「走らせて欲しい」ということで走らせてみると見事完走したそう! ◆◇◆◇◆◇◆◇ ◆◇こぼれ話②◆◇ 日本より先に始まったアメリカのマイクロマウス大会は、サイズは同じだが「端から入って反対側へ出る迷路」であった。これでは壁伝いに行けば出られるので賢さは低い。日本での開催は「左手法(ひだりてほう:左手で常に壁に触れながら迷路を進めばゴールまで行ける)」「右手法」のような簡単なアルゴリズムでは到達できない、ゴールが中央にある難易度を上げた迷路を採用した。 ◆◇◆◇◆◇◆◇ |
| 1981年 |
■麥田憲司(むぎた けんじ):
日本システムデザイン株式会社 代表取締役社長。第3回優勝後は、マイクロマウスの審査員も務めた。現在も組み込み開発(特にハード)を行うかたわら、近隣の学生へ講義を行うなど人材育成にも貢献。 |
| 1983年 | ㈶ニューテクノロジー振興財団の前身であるマイクロマウス協会 設立 |
| 1985年 |
|
| 1986年 |
|
| 2005年 |
◆◇こぼれ話③◆◇
センサやソフトウェアのテクノロジーが進化した背景に加え、「明るくても暗くても動きなさい」という油田氏の「過保護にしすぎないマインド」は広く知られているそう。 ◆◇◆◇◆◇◆◇ |
| 2008年 |
◆◇こぼれ話④◆◇
ここに至るまで、2005年頃から出尽くした感があったそう。“何か新しいものを”と考える一方で『良い技術がより評価されるようなルールでなければならない』ことや『参加者自身が面白いと感じることでなければいけない』という運営者の想いがあり、安易に難易度を上げることはできなかったとのこと。 ◆◇◆◇◆◇◆◇ |
| 2009年 |
◆◇こぼれ話⑤◆◇
ハーフサイズが新設された当時、『ハーフは従来と別物』と感じたそう。ハーフにするとセンサーの精度が2倍必要で“10年くらい前のマウスを作っている感覚”と井谷氏※が述べている。 ◆◇◆◇◆◇◆◇
■井谷優(いだに まさる):
(元 日本システムデザイン株式会社 技術統括兼取締役)。初期のマイクロマウス界を引っ張っていった存在。全国大会は過去9回優勝。90年代前半はOtten氏(米)か井谷氏かという「2強時代」があった。一時期は依頼を受け九州の地区大会に過去のマウスを使って出場していたが、現在はレーザ検査装置などのセンシング技術を活かした業務に専念。 |
| 2011年 |
|
| 2018年 |
|
第一回の幻の完走者さんって一体誰だったんだろうね?もし技術者になっているとしたら、どんな仕事をしてるか教えてほしいなぁ。(ご連絡お待ちしています!)
映像を観たら当時はマウスを両手で「よいしょ」と抱える感じだったけど、今(ハーフは)は手のひらサイズ。それも時代を表しているわね!
3-3. マイクロマウス全国大会 優勝者一覧表
クラシックマウス競技
※マウス写真はクリックで拡大できます
| 1回[1980] | 完走なし【-】 [-][-][-][-] |
|---|---|
| 2回[1981] |
NORIKO-3【麥田 憲司】
 [37.2][39区13折][188.7][2輪ステッピングモータ] |
| 3回[1982] |
NORIKO-7【麥田 憲司】
 [26.5][64区17折][383.0][2輪DCモータ] |
| 4回[1983] | TU-27【上広 孝幸】 [33.84][72区23折][383.0][2輪ステッピングモータ] |
| 5回[1984] |
NAZCA【野村・井谷】
 [30.13][68区32折][406.2][2輪ステッピングモータ] |
| 世界 つくば博[1985] | NORIKO-X1【井谷 優】 [19.83][85区42折][771.6][2輪ステッピングモータ] |
| 6回[1985] | MAY-ROSE【山名宏治】 [22.36][75区22折][603.8][2輪DCモータ] |
| 7回[1986] | SIT-XVIII【芝浦工大】 [15.40][68区18折][794.8][2輪ステッピングモータ] |
| 8回[1987] |
マウスキットNORIKO【井谷 優】
 [19.83][91区37折][826.0][2輪ステッピングモータ] |
| 9回[1988] |
NORIKO-XX1【井谷 優】
 [15.84][76区34折][863.6][4輪ステッピングモータ] |
| 10回[1989] |
NORIKO-89【井谷 優】
 [12.47][65区38折][938.3][4輪ステッピングモータ] |
| 11回[1990] | MITEE6【David Otten(USA)】 [16.53][84区44折][914.7][2輪DCモータ] |
| 12回[1991] |
NORIKO-91【井谷 優】
 [10.81][67区41折][1115.6][4輪DCモータ] |
| 13回[1992] |
NORIKO-92【井谷 優】
 [9.78][76区13折][1398.7][6輪DCモータ] |
| 14回[1993] |
NORIKO-93【井谷 優】
 [9.95][72区23折][1302.5][6輪DCモータ] |
| 15回[1994] | MITEE7【David Otten(USA)】 [11.81][66区42折][1005.9][4輪DCモータ] |
| 16回[1995] | SsingSsing3【金炳洙・李周浩(韓国)】 [15.44][71区34折][827.7][2輪ステッピングモータ] |
| 17回[1996] | NORIKO-FINAL【井谷 優】 [12.74][76区23折][1073.8][5輪DCモータ] |
| 18回[1997] | Dudung【In-Yong Ha(韓国)】 [10.002][68区31折][1223.8][2輪ステッピングモータ] |
| 19回[1998] | Kwa-Gwang【Roh Chang-Hyun(韓国)】 [9.281][71区41折][1377.0][2輪ステッピングモータ] |
| 20回[1999] | Varam【Nam Young.Cho(韓国)】 [10.311][77区47折][1344.2][2輪ステッピングモータ] |
| 21回[2000] | I.N.G【Oh Kil-Young(韓国)】 [9.881][73区30折][1329.8][2輪ステッピングモータ] |
| 22回[2001] | NING2【Wong Kok Kiong(シンガポール)】 [9.727][71区42折][1313.9][2輪ステッピングモータ] |
| 23回[2002] |
マイクロマウス-3【井谷 優】
 [8.953][75区37折][1507.9][6輪DCモータ] |
| 24回[2003] | Min3G【Ng Beng Kiat(シンガポール)】 [8.391][75区43折][1608.9][2輪DCモータ] |
| 25回[2004] | Min4【Ng Beng Kiat(シンガポール)】 [8.403][86区49折][1842.2][2輪DCモータ] |
| 26回[2005] | BR3【YIN HSIANG TING(シンガポール)】 [7.463][73区50折][1760.7][2輪DCモータ] |
| 27回[2006] | Min4A【Ng Beng Kiat(シンガポール)】 [7.344][69区48折][1691.2][2輪DCモータ] |
| 28回[2007] | HOPE Y8A【Jackson Youn Shi Kat(シンガポール)】 [6.505][71区33折][1964.6][2輪DCモータ] |
| 29回[2008] | Min5【Ng Beng Kiat(シンガポール)】 [6.433][76区42折][2126.5][2輪DCモータ] |
| 30回[2009] | Rush【Soh Yi Lang(シンガポール)】 [5.050][59区49折][2103.0][2輪DCモータ] |
| 31回[2010] | Tetla【加藤 雄資】 [4.693][57区37折][2186.2][4輪DCモータ] |
| 32回[2011] | Min7.1【Ng Beng Kiat(シンガポール)】 [3.921][57区37折][][4輪DCモータ] |
| 33回[2012] | Tetla【加藤 雄資】 [6.181][][][4輪DCモータ] |
| 34回[2013] | Tetla【加藤 雄資】 [7.939][][][4輪DCモータ] |
| 35回[2014] | 紫電改【宇都宮 正和】 [6.574][][][4輪DCモータ吸引] |
| 36回[2015] | Diu-Gow【Cai,Xin-Han・Lin,Yu-chih(台湾)】 [6.301][][][4輪DCモータ吸引] |
| 37回[2016] | Diu-Gow 4【Cai,Xin-Han/Wu,Zhao-Yi(台湾)】 [4.655][][][] |
| 38回[2017] | 赤い彗星【宇都宮 正和】 [7.284][][][4輪DCモータ吸引] |
| 39回[2018] | ExiaAlter【平松 直人】 [4.939][][][4輪DCモータ吸引] |
| 40回[2019] | 華金【浅川 英慶】 [4.143][][][] |
| 41回[2020] | 毎年11月頃に開催されている全日本マイクロマウス大会ですが、第41回[2020]は新型コロナの影響で延期、その後、参加者が事前撮影した走行動画を用いた【オンライン競技】となりました。(※環境が均一ではないため特別賞以外の各種表彰はなし) |
| 42回[2021] | Elmeth【宇都宮 正和】 [3.697][][][] |
| 43回[2022] | Elmeth【宇都宮 正和】 [4.143][][][] |
| 44回[2022] | XM702 carmine【船田 健悟】 [2.100][][][] |
マイクロマウス競技(旧ハーフサイズ)
| 30回[2009] | Bee【加藤雄資】 [4.079][47区18折][1037.0][2輪DCモータ] |
|---|---|
| 31回[2010] | Excel:Mini-2【Khiew Tzong Yong(シンガポール)】 [5.513][79区50折][1289.7][2輪DCモータ] |
| 32回[2011] | こじまうす7【小島宏一】 [4.991][57区37折][][2輪DCモータ] |
| 33回[2012] | こじまうす7【小島宏一】 [11.719][][][2輪DCモータ] |
| 34回[2013] | こじまうす9【小島宏一】 [7.939][][][4輪DCモータ] |
| 35回[2014] | こじまうす10【小島宏一】 [8.766][][][4輪DCモータ] |
| 36回[2015] | Sapphire【松井祐樹】 [6.488][][][4輪DCモータ] |
| 37回[2016] | Fantom【松井祐樹】 [5.269][][][] |
| 38回[2017] | 翠嵐【宇都宮正和】 [10.559][][][4輪DCモータ吸引] |
| 39回[2018] | Fantom2nd【松井祐樹】 [9.045][][][4輪DCモータ吸引] |
| 40回[2019] | Fantom2nd【松井祐樹】 [7.654][][][4輪DCモータ吸引] |
| 41回[2020] | 毎年11月頃に開催されている全日本マイクロマウス大会ですが、第41回[2020]は新型コロナの影響で延期、その後、参加者が事前撮影した走行動画を用いた【オンライン競技】となりました。(※環境が均一ではないため特別賞以外の各種表彰はなし) |
| 42回[2021] | Fantom3rd【松井 祐樹】 [5.959][][][] |
| 43回[2022] | Fantom4th【松井 祐樹】 [9.157][][][] |
| 44回[2023] | djtkuwaganon_act5E【高橋 良太】 [3.779][][][] |
マイクロマウスの歴史表を見てみると、「日本のものづくり(※組み込みシステム分野における)の歴史」と「マイクロマウスの歴史」が重なることが良く分かるそう」だよ。
マイクロマウスが始まった当初は日本人がしばらく上位を占領してるよね。
その後一時(第16回・1995年あたりから)日本で、ものづくりの熱が冷めたというか社会全体がパソコンやソフトの方に走ってハードに興味がなくなった時期があったんだって!実際に、新しい参加者は減っていったらしいよ。
18回(97年)くらいから30回(2009年)くらいまでの12・3年間は、今度は韓国勢やシンガポール勢が独占!
でもここ最近、また日本でも組み込みシステムにおける「ものづくり」への熱が上がり始めたって。
ロボットは、これからの時代の暮らしには必要だもんね。
4. 日本システムデザイン(株)とマイクロマウス

切っても切り離せない存在です。
弊社の創立に関わった2人のキーマン(代表・麥田、元技術統括・井谷)は、マイクロマウスに情熱を持ったことで、出会うことができました。
以下には、日本システムデザイン(株)とマイクロマウスに関係することをご紹介。
他には載っていない貴重な資料や、これからマウスを始めてみたいと思っている方へのメッセージもご紹介したいと思います!
4-2. スラローム走行の動画
スラローム走行とは「90度曲がるけど、なめらかに曲がる」ことです。
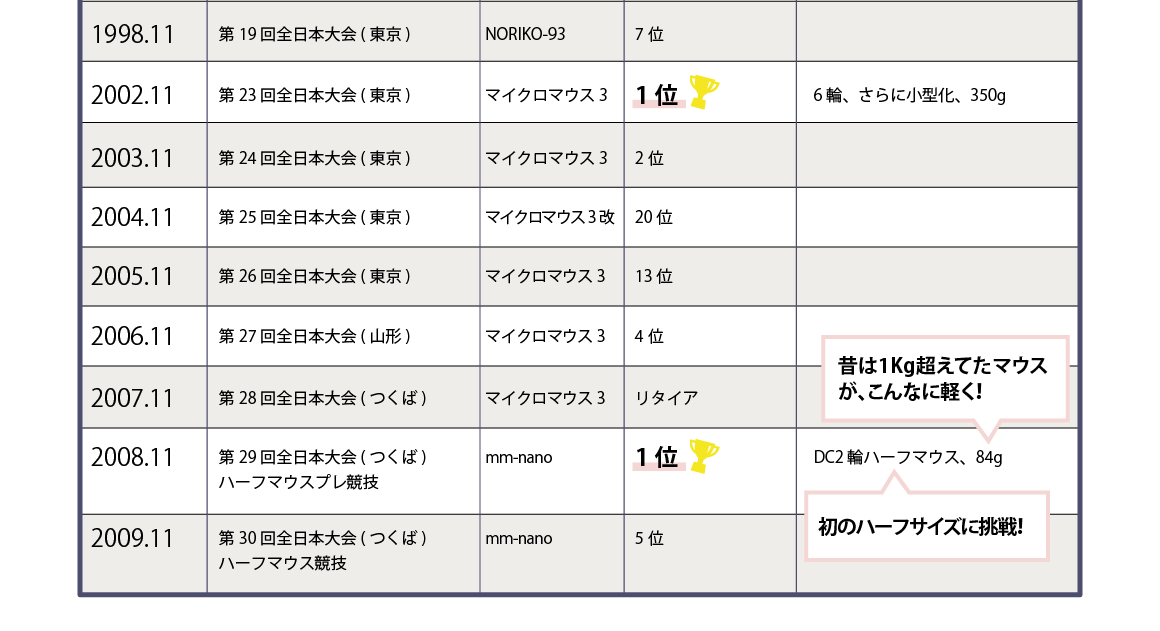
4-3. 井谷の成績一覧
時系列で確認することで、マイクロマウスが進化している様子も浮かびあがってきますね。
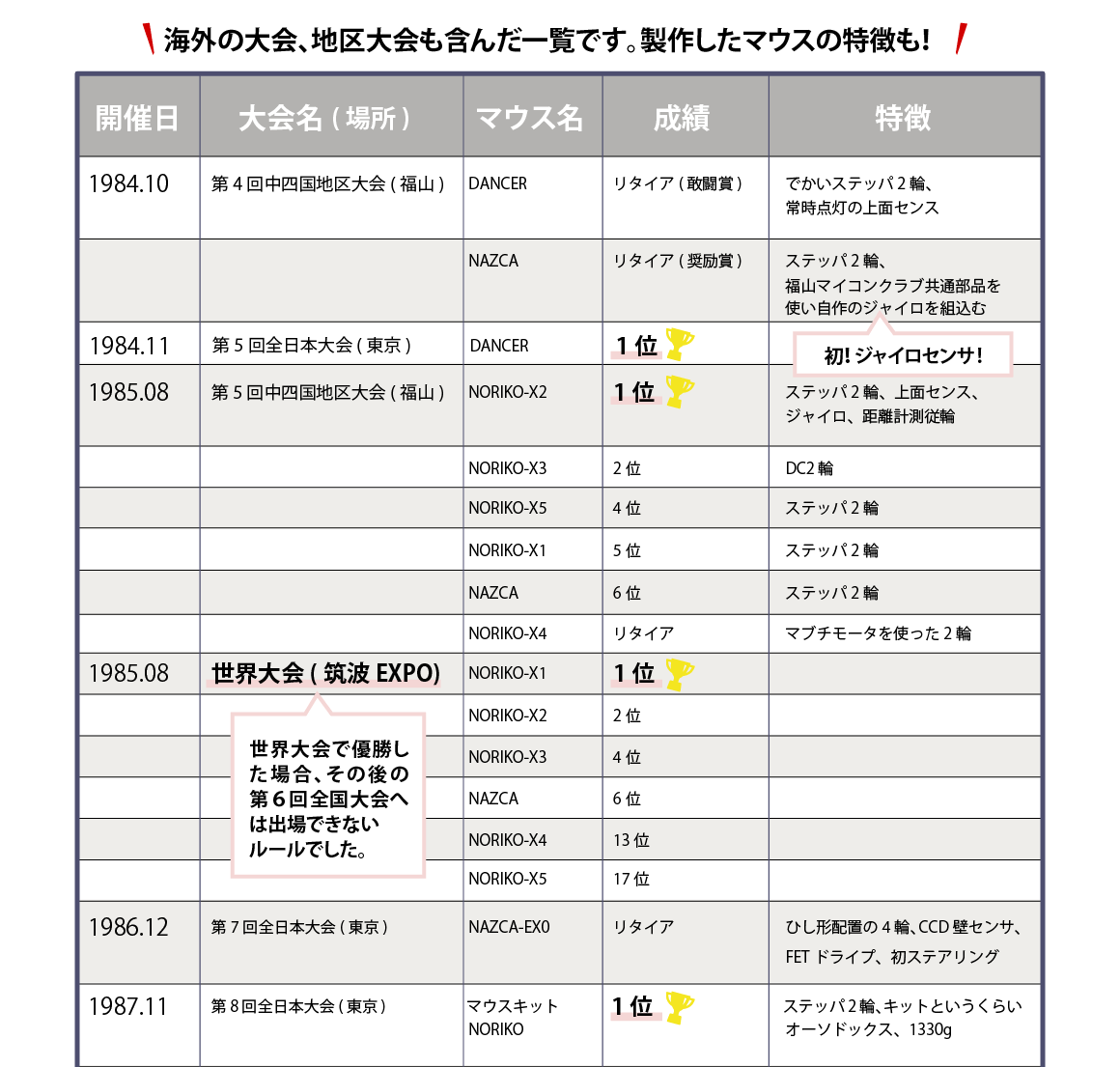
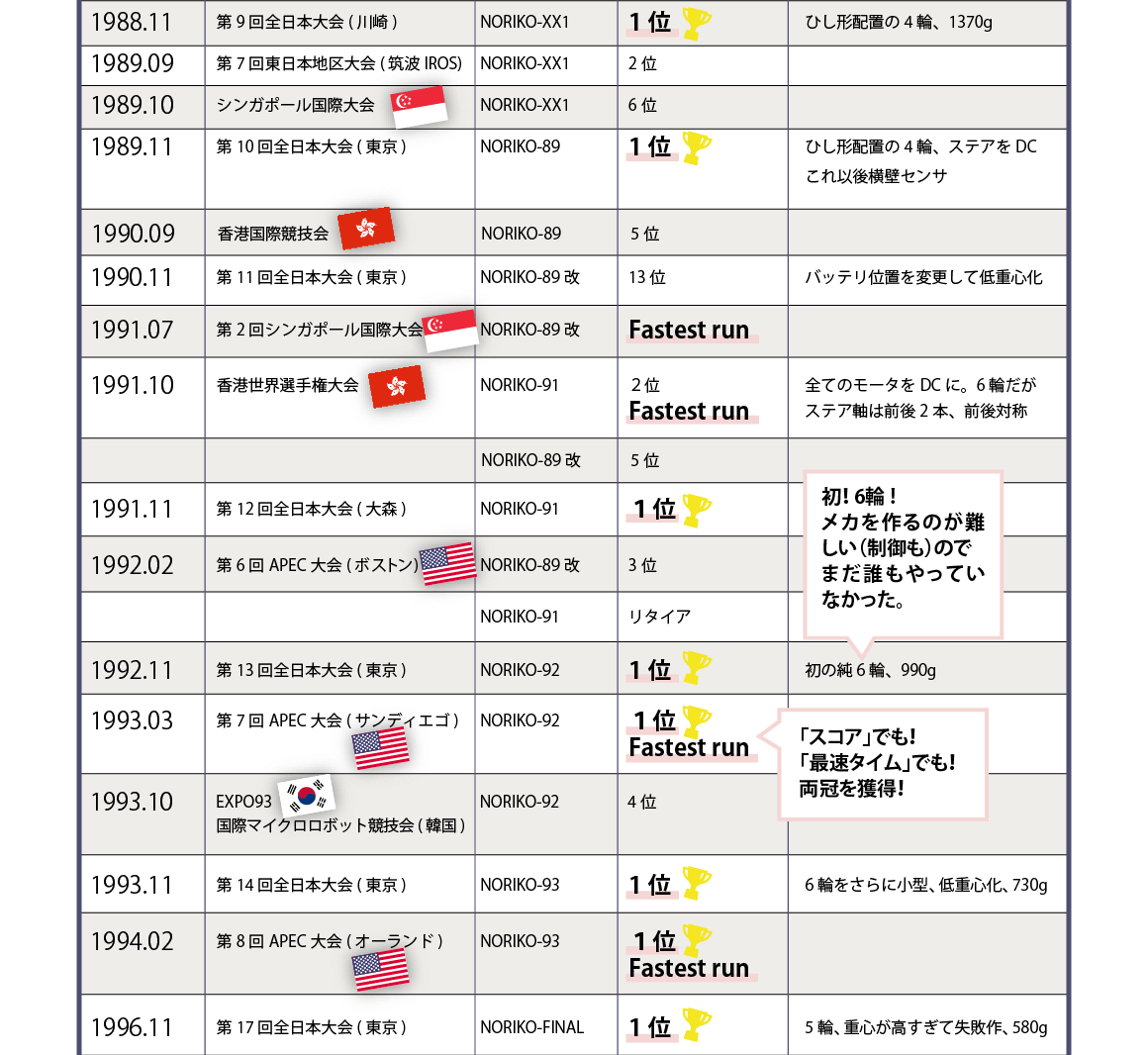
スタートからゴールまでのタイムが一番速かったマウスのこと。
海外ではマウスの順位を決めるのはスコア方式。探索走行の速さなども加味されるので、最も早いマウスに選ばれてもトータルスコアでは1位にはなれなかったりします。
4-4. 「マイクロマウスの歩んだ路」
著:井谷優 ロボット学会誌掲載 2009.11
【Download】リンクをクリックで論文(PDFファイル)をダウンロードいただけます
4-5. 足立法の冊子
マイクロマウスをやっていて知らない人はいない「足立法」の冊子です。
足立法とは・・・
- ゴールまでの白地図をみて最短コースを思い浮かべる
- 途中壁にぶつかったらそこに壁があることを考慮して、最短コースを考え直す(それまでに通ったところの壁なども考慮)
- それを繰り返しながら進む
という「未知の壁を無いものとして考える」方法になります。
冊子の中には、このような記述が。
ゴールの位置がわかっていれば、そこへの最短コースを予想して調べに行きます。ダメだったら考え直す。この発想です。
それまでは、「一度迷路を全部走ってから最短経路を求める」というのが普通だったとのこと。
新しい考え方---。新しいけど、人間と同じ考え方で面白いですよね。
実は足立芳彦さんは、弊社麥田社長・井谷と同じ福山マイコンクラブに高校生のころ所属していました。その時にこの理論を思いついたそうです。
そして、今でも主流の探索方法は「足立法」を発展させたもの。
上位クラスのマウスは、ほとんどこの探索方法(アルゴリズム)を使っています。
4-6. アジア太平洋博覧会 郵政パビリオン「ゆうゆう村」
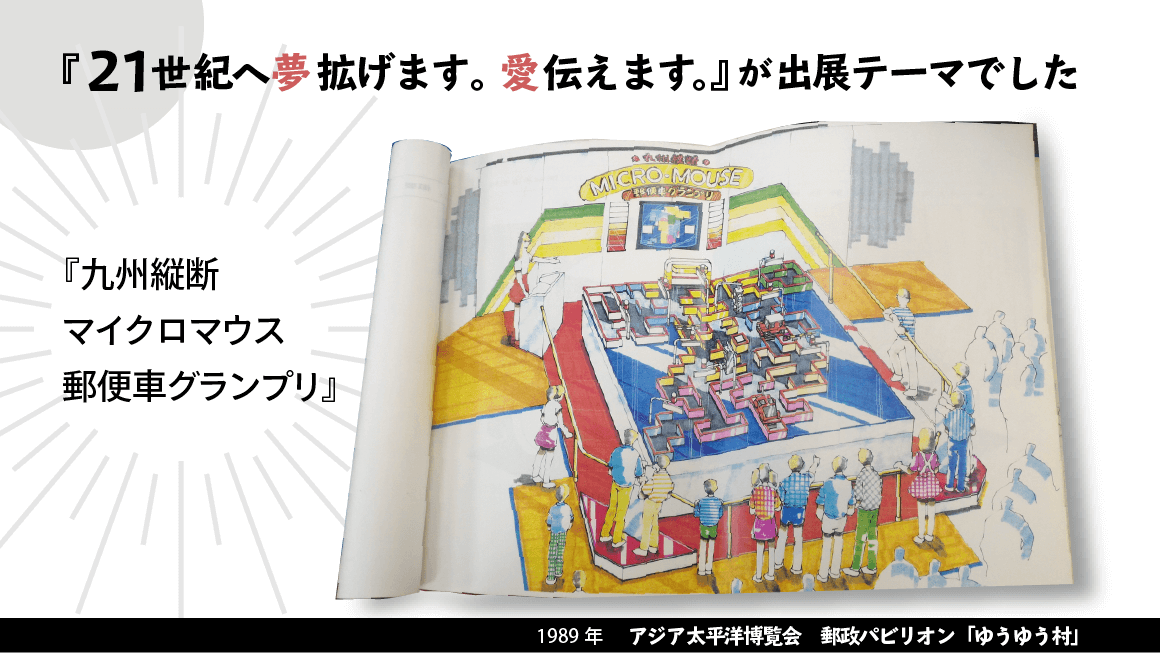
昔と未来の郵便車が郵便ポストを回りながら、ゴールを目指してカーレースを展開するエキサイティングな参加型イベントだったそうです。
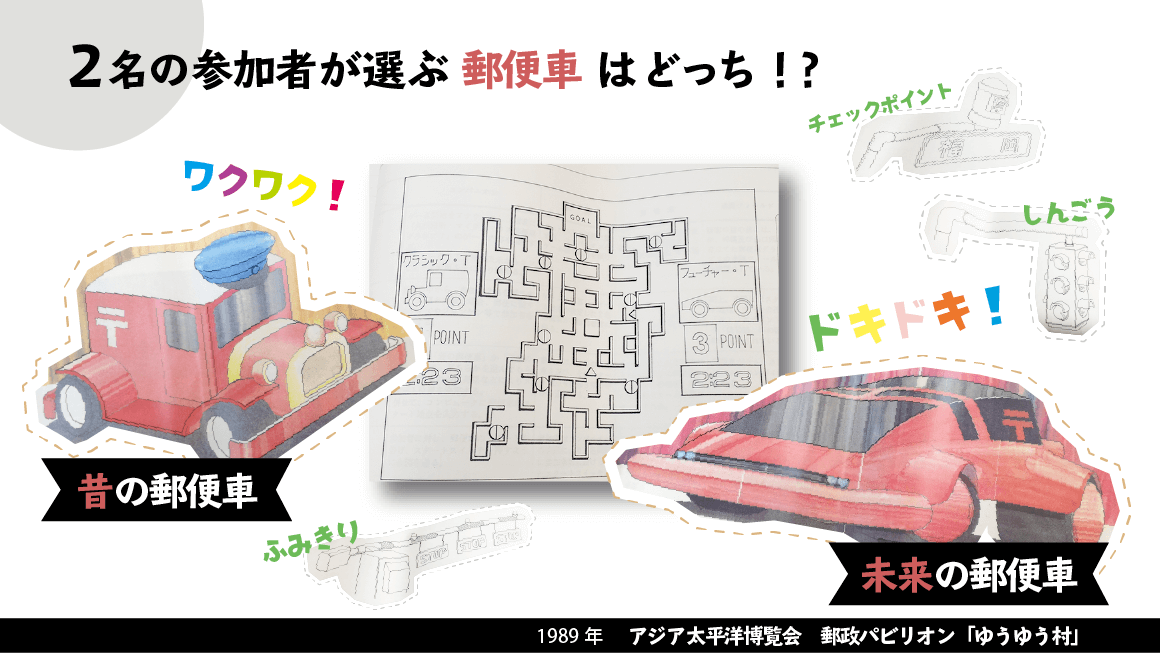
途中で道に迷ったり、阿蘇山が噴火しているときは周囲1区画を避けて走行したりなど障害物が設けられており、参加者は無事ゴールできるかハラハラする競技でした。
4-7. マイクロマウスの発展型とは?
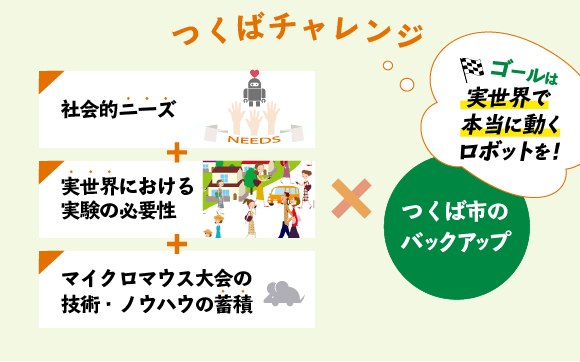
つくばチャレンジ ~ロボットが公道を走る?~
実は、つくばチャレンジは「マイクロマウスの発展型」といえる実験的イベントなんです。
マイクロマウスは“個人で記録を求める競技”ですが、それをもっと【人の役に立つものに落とし込めるものは無いだろうか】という発想から生まれたのが「つくばチャレンジ」なんだそう。

茨城県つくば市で、“ロボットが人間の操作を受けずに” 街中を走る技術チャレンジ。
人々が生活している実世界の中で、「ロボットが自律的に行動するために必要な技術を追求すること」を目的とし公道が使われている。公道を使うことで一般市民にもロボット技術に触れてもらう場の一助ともなっている。
2012年以降は、つくば市のつくばチャレンジ実行委員会が主催。
マイクロマウスとは違ってスタートからゴールまでのタイムが速いかどうかは重要ではなく、スタートからゴールまで【賢く】走ることが最も重要になります。
例えば・・・
“人が居たら避ける”
“横断歩道ではきちんと待つ”。
のように、
『人と共存、共生』していけるロボットを作るための珍しい実験の場なんです。
これはマウス育ての親である田代氏の想いにも繋がりますよね。
ロボットのために環境を変えるのでは無く、今ある実環境で使えるロボットを作る技術を考える。ロボットと共存するためにはとても必要なことで、つくばチャレンジの目的でもあります。
〈No.72 広島市立大学ロボティクス研究室&JSD というチームで参加〉

残念ながら・・・トライアル走行でコースを外れてリタイアしてしまったそう。センサーの精度に依存することや、地方からの参加は事前走行があまり出来ずつらいところ、なんだって。
広島にもそういった場がいつか出来ると良いなぁ。下の動画では、実際の倒立振子型ロボット[GENT]が動く様子を公開中!
■座標を指定して自動走行する 倒立振子型ロボット[GENT]
振子型 → しんし → 紳士 → GENT と代表・麥田が命名!
■つくばチャレンジ2009 トライアル走行
トライアル1回目では、坂道で派手に転んで接触センサとレーザを振るモータを壊してしまう。(トライアル走行の距離は140m)
- 【 トライアル1回目 】
- 53mでリタイア。
- 【 トライアル2回目 】
- 105m。トライアル未通過ロボットとしては最長距離。

<ニューテクノロジー振興財団様 より引用>
4-8. 代表・麥田の優勝ストーリー
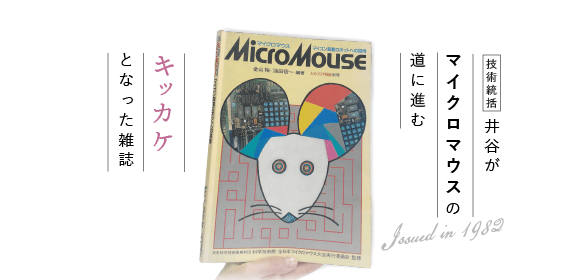
引用:「MicroMouse マイコン知能ロボットへの招待(トランジスタ技術別冊)」表紙,CQ出版株式会社,1982年9月1日初版発行 ◆◇掲載を快く許可いただきましたCQ出版株式会社様のご厚意に感謝し御礼申し上げます。◆◇
代表・麥田の第2回マイクロマウス全国大会優勝に至るまでのストーリー・本人が執筆した技術情報などが掲載されています。
実は・・・
元技術統括・井谷が “マイクロマウスの道に進むきっかけ” となったのも、この雑誌とのことでした。ここでは、第2回全日本マイクロマウス大会で初めての優勝者になった代表・麥田のストーリーをかいつまんでご紹介します。
ナント、たった1年2ヵ月で優勝マウスを制作!
その時はマイクロマウスどころか「マイコン」に触れたこともなかったそうです。
「やってみたい」
そう興味を惹かれてから1年2ヵ月後に優勝するまでには、色々なストーリーがありました。
- CPUボードが届いた際にあると思い込んでたキーボードが無く、途方に暮れて “ 福山マイコンクラブ ” に「助けを求めたこと」
- 捨てるところは捨てて、効率を第一に「取捨選択したこと」
- たまたま、クラブ内に勝てない人が居たことで「作り直した」こと
どれかひとつが欠けても、ここ広島の日本システムデザイン株式会社は無かったかもしれません。
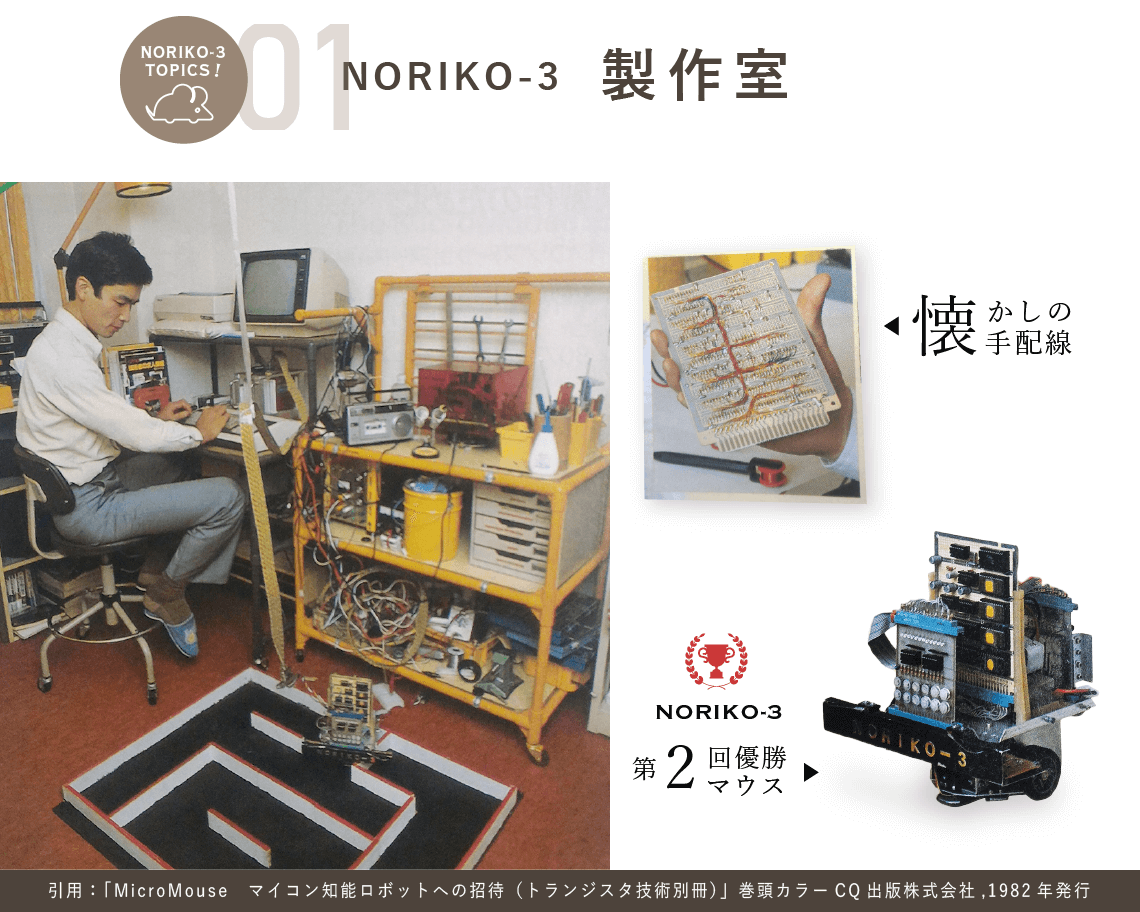
▲ 製作の様子。効率よく開発することが重要と考え、パソコンを購入。PCとマウスは紐で接続しています!
![【マイクロマウス[NORIKO-3]製作年表】引用:「MicroMouse マイコン知能ロボットへの招待(トランジスタ技術別冊)」P.10[表1],CQ出版株式会社,1982年9月1日初版発行](https://jsdkk.com/home/wp-content/uploads/2019/05/8a6e864d5ac5a201a5503be47a736e05.png)
▲ NORIKO-3製作年表。マウスに出会ったのは優勝の1年2ヵ月前。
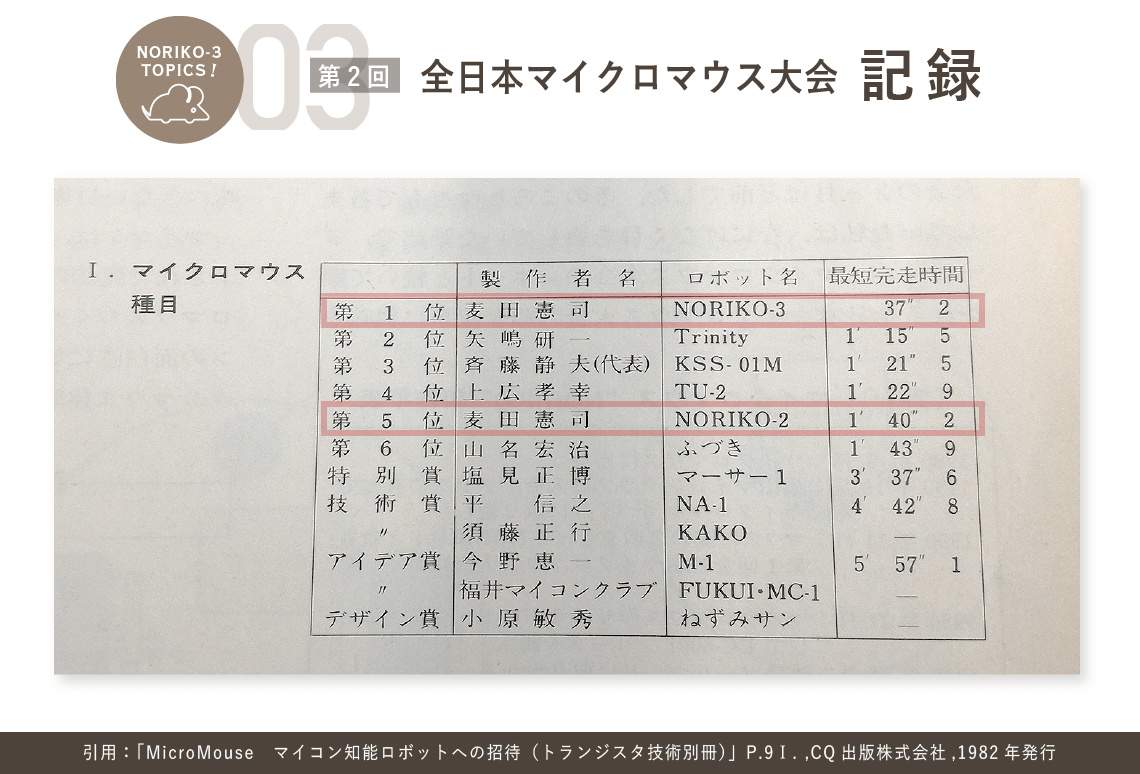
▲ 2位と「38秒3」の大差をつけた、第2回マイクロマウス大会の記録表。5位には、NORIKO-2の名前も。
第2回大会以降は上面センスが主流に。
![【採用した光センサ】(迷路壁の上面をセンス。反射型フォト・センサ)引用:「MicroMouse マイコン知能ロボットへの招待(トランジスタ技術別冊)P.14[図9],CQ出版株式会社,1982年9月1日初版発行](https://jsdkk.com/home/wp-content/uploads/2019/05/83f081e8f02b991a23340f0c03150e3e.png)
▲ NORIKO-3優勝後は、壁の上面センスが主流に。
その流れが変わったのは、「壁側面の距離を測る」という画期的なロボット、仙台空港事務所マイコンクラブ「かるがも」(第9回[1988]でナムコ賞を受賞)登場以降となる。
ROM×4個も搭載。
![【基板コネクタおよびセンサ取付け部】(ROM×4個も搭載)引用:「MicroMouse マイコン知能ロボットへの招待(トランジスタ技術別冊)P.33[図40],CQ出版株式会社,1982年9月1日初版発行](https://jsdkk.com/home/wp-content/uploads/2019/05/d87f619f06354da219090303ecc55440.png)
▲ 通常、ROMは1個で十分。NORIKO-3では、あえて「TL/1」という高級言語を採用したためメモリが多く必要となり “4個も” 搭載!
レーシングカーの考え方と、NORIKO-3を作れた理由
1.トータルバランスを考えて手を抜くところは抜く
[優勝をめざして]
・・(省略)・・そこでNORIKO-3では、徹底的に軽量化を図ることにしました。
NORIKO-3は、ともかく10分間まともに走ってくれればよいという設計方針にそってつくっています。マイクロマウスは実用車ではなく、レーシング・カーだという考え方です。たとえば、モータ用の電源はフル充電の状態から10分程度しか使用できませんし、CPU電源もレギュレータを使用していないため、必ず充電したばかりの電池を使う必要があります。いざ本番で電圧低下によるトラブルが起こってはつまりません。CPUボードなどは、素子自体優秀になってきていますから、多少、雑な作り方をしても、いったん動作を確認できれば、けっこうしっかり働いてくれます。とくに、マイクロマウスは足まわりが弱点となりやすいですから、トータル・バランスをよく考えたうえで、手を抜くべきところは手を抜くという考え方がぜひ必要と思います。引用:「MicroMouse マイコン知能ロボットへの招待(トランジスタ技術別冊)」P.32,CQ出版株式会社,1982年9月1日初版発行
2.どうしても勝てないマウスがいて悔しくって・・・
[なぜNORIKO-3をつくったか]
NORIKO-2がゴールへ向かって走り始めたのは5月ごろでした。・・(省略)・・
もちろん、最初は、ともかくゴールについたということで大喜びでした。
ところが、同じく完成した福山マイコンクラブの上広さん(高校の先生)のマイクロマウスは、1分20分台で、しかもかなり確実にゴールへ到達していました。そこで、福山でのマイクロマウス大会が行われる7月中旬までに、新しいマウスを作ることにしたのです。実際のところ上広さんがいなければNORIKO-2がゴールに到着したことで満足して、NORIKO-3をつくることもなかったと思います。そういう点でも、福山マイコンクラブに入会できたことはとても恵まれていました。引用:「MicroMouse マイコン知能ロボットへの招待(トランジスタ技術別冊)」P.32,CQ出版株式会社,1982年9月1日初版発行
4-9 メッセージ

自分で新しいことを考えるのをやめないで欲しい
ちなみに、40年前はオタク扱いでした 】
日本ではまだ誰もやったことがなく面白そうで、やってみたいと思いました。
先駆者のいない競技をやるのは、「勝ちたい!」という負けず嫌いな性格のせいだと思います。
井谷さんは、ジャイロセンサなど新しい技術を素早くものにできる才能がある人です。
それが、マウスで常に上位にいた理由のひとつです。
私たちがマイクロマウスを始めた頃は、マイコンに関する情報がほとんど無くて書店で隅から隅まで探してやっと2,3冊の本を見つけることができた、そんな時代でした。
ですが今の時代はインターネット上に無数にあって、必要な情報が簡単に手に入ります。
逆に情報が多すぎて活用するところまでたどり着けなかったり、なんとなく出来た気になって終わったり。
「新しいことを考えること」をやめてしまったり、するかもしれません。
そういう今の時代でも、
マウス製作は「組み込みシステムのものづくり」において、ちょうど手ごろなテーマです。
その理由は2つあります。
1つ目は、【メカ、ハード、ソフト、すべてを一人でマネジメントできる規模のシステムだから】。
優れたロボットを開発するには、『メカ、ハード、ソフトすべてに関する知識が必要』です。
例えば、ソフトとハードは相互関係にあるので、望む機能をソフト・ハードの「どちらで実現させるのか」配分も考えなければいけません。(実際にシステムを設計する際、ハードウェア担当者とソフトウェア担当者のコミュニケーションが上手くいっていないと「ソフトウェア担当者の望むハード設計になっていない」など困ることが起こったりもします)
ロボット研究開発の分野では、例えばハードの要件は決まっていてソフトだけを枠の中で当てはめて考えるのでは、自由な発想ができません。
一方、マイクロマウスは「配分も含めてシステム全体を自分で組み立てるため」常識にとらわれないクリエイティブなものづくりにおいて最適な題材なのです。
2つ目の理由は、【競技だから】です。
勉強や試験は嫌々やりますよね?
ですがスポーツのように競技となると急にやる気が起こるもので、例えば徹夜してでもやってしまうというようにモチベーションの面からも、うってつけなのです。
まだ作ったことのない人から見るととても難しそうに見えるかもしれませんが、頑張れば完全にひとりで作れます。
新しい発想を生み出すきっかけになれば、と思うのです。
◆◆ P.S ◆◆
昔はマイコンを使う人なんてオタクの世界で(笑)
喫茶店で話をするのもコソコソしてましたが今の時代は堂々とできますし、上位入賞すればきっと就職でも強い武器になるはずですよ。

まずは自分のレベルで作って楽しめば良いと思います 】
例えば、まずは1区画走らせることから始める。
モータやCPUボード、タイヤなどを集めて。
センサの情報などは今ではネットで探せば沢山出てきます。
初心者の方は、「左手法」「右手法」から始められるのが良いかもしれないですね。
一区画さえ走れば地区大会に出られますので、次への目標がきっと出てきますよ!
◆◆ P.S ◆◆
今続けている「ものづくり」は、ずっと楽しいです。仕事が趣味みたいなものですね。
あの時、マイクロマウスに出会って。
マイクロマウスを追求してその技術を職業にできて、本当に良かったと思っています。
[mm3sakusya @ ウィキ]
井谷さんは、マイクロマウスに出会った時「これを職業にしたい!」と強く思ったそうだよ。何日間も上手くいかない日が続いて、ある時解決法が見つかったときが快感なんだって!
『人』しか出来ないこと・『人』がやることに意味があることは沢山あるけど。
人口が減っていく日本では、『自動化できるところ』をロボットがすることで人手不足を補うことが必要不可欠だよね。
その『人間がやっていたことを代わりにロボットがする』というところを日本システムデザイン(株)のような、組み込みエンジニア達が手助けすることができるんだね。
麥田社長はあまり人前では言わないんだけどね、
『日本の優秀な人材が埋もれてしまわないでほしい。
ちょうど良いテーマと出会うことで、埋もれてしまわないひとつのきっかけになればいいかなと思う。
例えば、そのテーマが「マイクロマウス」かもしれない。』
という想いがあることをこっそり教えてくれたわよ。
マイクロマウスという競技に出会うことで、素質を持った人が「光るきっかけ」となって日本の組み込みエンジニアのレベルが底上げされるなんて素敵!!
お問い合わせはこちら
- < 参考文献 >
-
■ニューテクノロジー振興財団 設立20周年 マイクロマウスと共に歩いた20年記念座談会【前編】【中編】【後編】<NTF財団設立20周年企画として 2006.11>
■「マイクロマウス30年史」 ロボコンマガジン <2009.11>
■「小型移動ロボットの自立誘導方式の研究」春日知恵 <1995.01>
■「MicroMouse マイコン知能ロボットへの招待(トランジスタ技術別冊)」編著:金山裕、油田信一 1982年9月1日初版発行 / CQ出版株式会社
- < 参考サイト >
- ■公益財団法人ニューテクノロジー振興財団 >マイクロマウス
- < 画像提供 >
-
■一部の画像は、ニューテクノロジー振興財団様より許可を得て掲載させていただいております。
■一部の画像は、一般社団法人二足歩行ロボット協会様より許可を得て掲載させていただいております。
■一部の画像は、富士ソフト ロボット相撲大会事務局様より許可を得て掲載させていただいております。
■一部の画像は、CQ出版株式会社様より許可を得て掲載させていただいております。