12月に入り、広島も少しずつ寒くなってまいりました。
平素は格別のお引立てを賜り誠にありがとうございます。
年末年始の休業日が決定いたしましたのでお知らせさせていただきます。
1.最終営業日 2019年12月27日(金)
2.休業日 2019年12月28日(土)~2020年1月5日(日)まで
3.営業開始日 2020年1月6日(月)から
休業中はご迷惑をおかけいたしますが、
何とぞご了承のほどよろしくお願い申し上げます。







12月に入り、広島も少しずつ寒くなってまいりました。
平素は格別のお引立てを賜り誠にありがとうございます。
年末年始の休業日が決定いたしましたのでお知らせさせていただきます。
休業中はご迷惑をおかけいたしますが、
何とぞご了承のほどよろしくお願い申し上げます。

表紙には、弊社創業のきっかけでもあるマイクロマウス「NORIKO-3(代表・麥田制作)」を採用しています。
「どんな会社なの?」という方はぜひご覧ください。
弊社は、代表・麥田と井谷がマイクロマウスに情熱を持ったことから始まりました。
マイクロマウスは、組み込みシステムのハード・メカ・ソフトを一個人で全て作ることができる『ギリギリのサイズ』なんだそうです。
マイクロマウスって何?という方は詳しい解説もぜひご覧ください!
誕生の歴史やマイクロマウス競技の意義と魅力、さらに「どこにも載っていない貴重な資料」なども公開しております。

平素は格別のお引立てを賜り誠にありがとうございます。
夏季休業期間が決定いたしましたのでご連絡させて頂きます。
休業中はご迷惑をおかけいたしますが、
何とぞご了承のほどよろしくお願い申し上げます。

工学博士であり「半導体レーザ・光ファイバーを活用した計測装置の開発」等々に精通している岡田氏に技術的な面からアドバイスいただくことで、今後ますます技術力を強化・進化させ、より世の中に役に立つ新しい製品を開発していけたらという意向でございます。
今後ともどうぞよろしくお願い申し上げます。

2005年より産業技術総合研究所の産学官連携コーディネータ、定年退職後、公益財団法人のコーディネータを経て2014年より産総研中国センターにおいて産学官連携支援活動に従事。
2019年から当社の技術アドバイザー。
当社の麥田社長、井谷氏とは1985年の会社設立以来、ユニークな発想に基づく新規な計測装置の開発に関して共同研究を行っており、複合視覚センサー、移動ロボット、ピッキングロボットシステム、レーザ傷検査装置などの様々な革新的な装置を共同開発してきた。
*** *** *** *** *** *** *** *********
産総研との共同開発については、こちらで公開中です。

*** *** *** *** *** *** *** *********

平素は格別のお引立てを賜り誠にありがとうございます。
2019年のゴールデンウィーク休業日が決定いたしましたので、お知らせいたします。
休業中は大変ご迷惑をおかけいたしますが、
何とぞご了承のほどよろしくお願い申し上げます。

日本システムデザイン株式会社は、
2019年2月1日で34周年を迎えました。
これも、ひとえに皆様のおかげであり、深謝申し上げます。
(皆様とは、お客様、ご支援・ご協力いただいた方々、株主様、地域の皆様など、関わりのあった方すべてでございます)
35年目もどうぞよろしくお願いいたします。
*** *** *** *** *** *** *** *********
これから、少子高齢化を迎える日本では、
ますます「ロボットが必要となる時代」がやって来ると思われます。
その時代の中で、オーダーメイドの組み込みシステムを提供することで
社会に貢献することができれば幸いに存じます。
*** *** *** *** *** *** *** *********
P.S
これを機に、日本システムデザインの歴史となる資料を掘り起こしましたので公開させていただきます!マイクロマウスヨーロッパ大会(1984年)の貴重なフィルム写真を撮影したものもあります。 By Web管理人
***** 懐かしい写真を公開!(第2弾) *****
クリックで画像が拡大されます。
ぜひご覧ください
1988年以降に製作していた【V25 CPUボード】の説明本
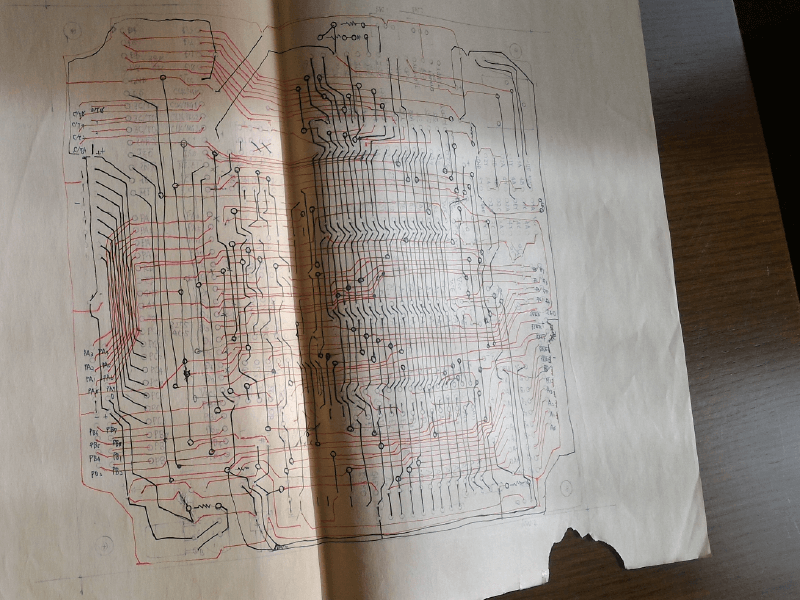
今は無い“手書き”の基板(センサ)設計書。
1984年ヨーロッパ大会のチーズ型トロフィーは可愛い♡

1984年ヨーロッパ大会表彰式の様子。コペンハーゲン市長も出席されたそう。

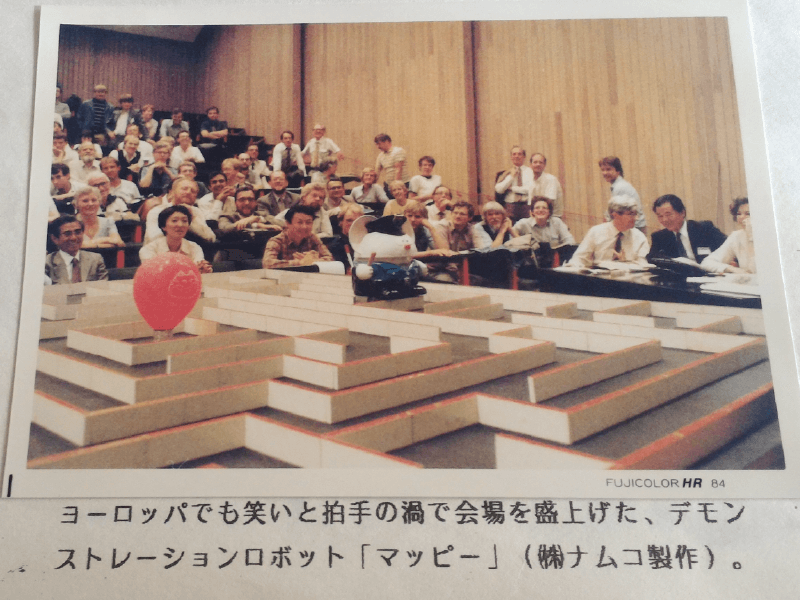
ナムコ製『マッピー』は会場を盛り上げたのだそう!
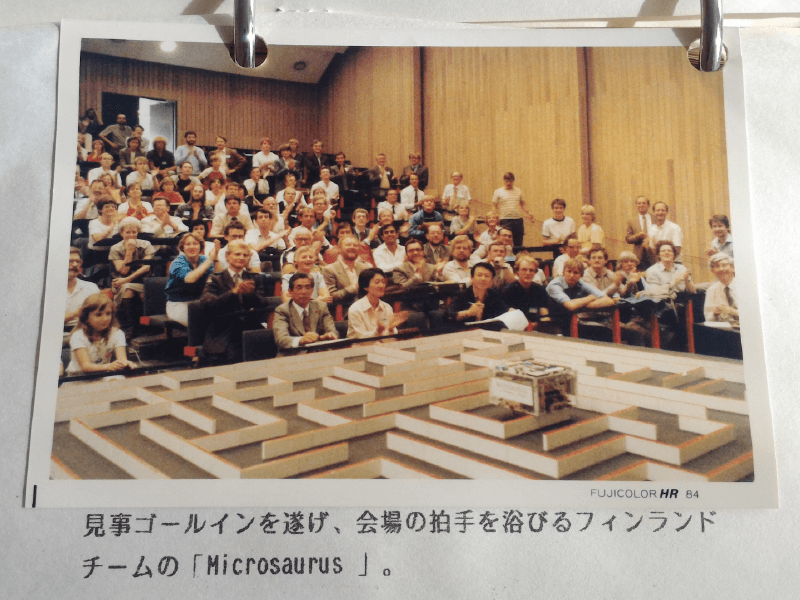
[1984年ヨーロッパ大会]
フィンランドチームの『Microsaurus』が見事ゴールしたシーン。
マイクロマウスの小冊子(’88 3月)。井谷がジャイロやNORIKOキットについて説明。
手書き!のボード設計図
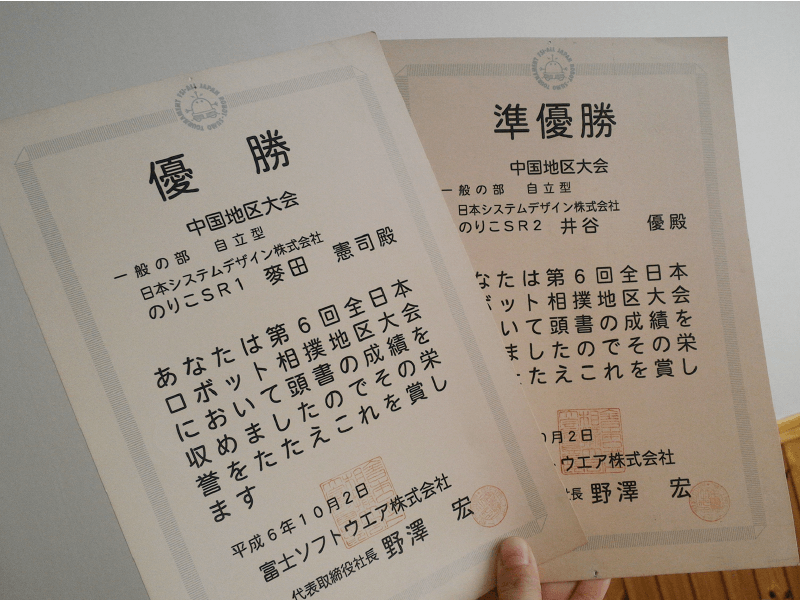
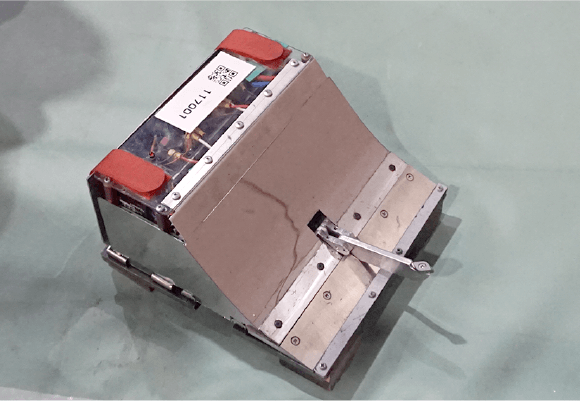
第6回ロボット相撲地区大会の賞状 この全国大会では【科学技術庁長官賞】を受賞!

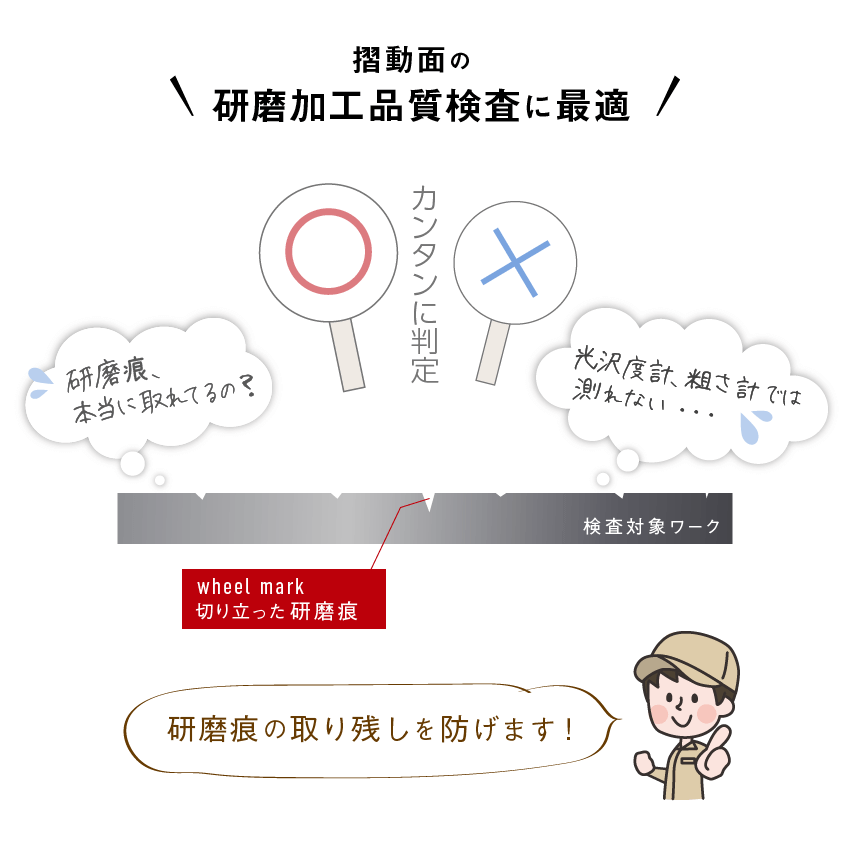
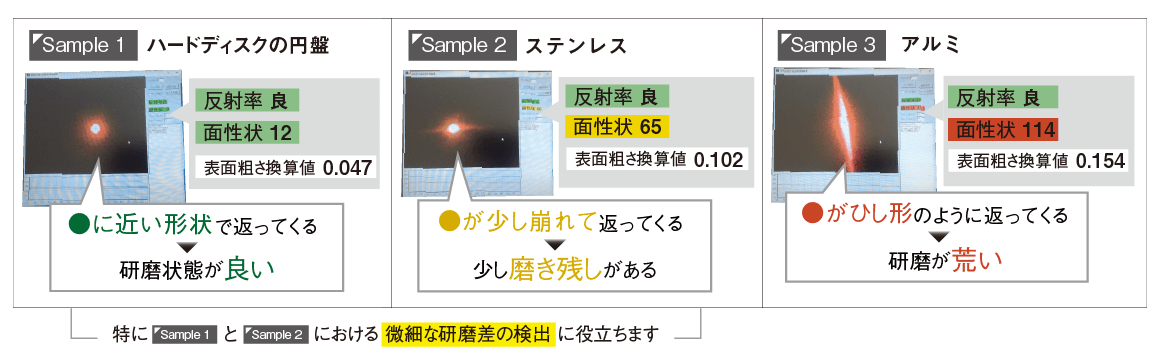
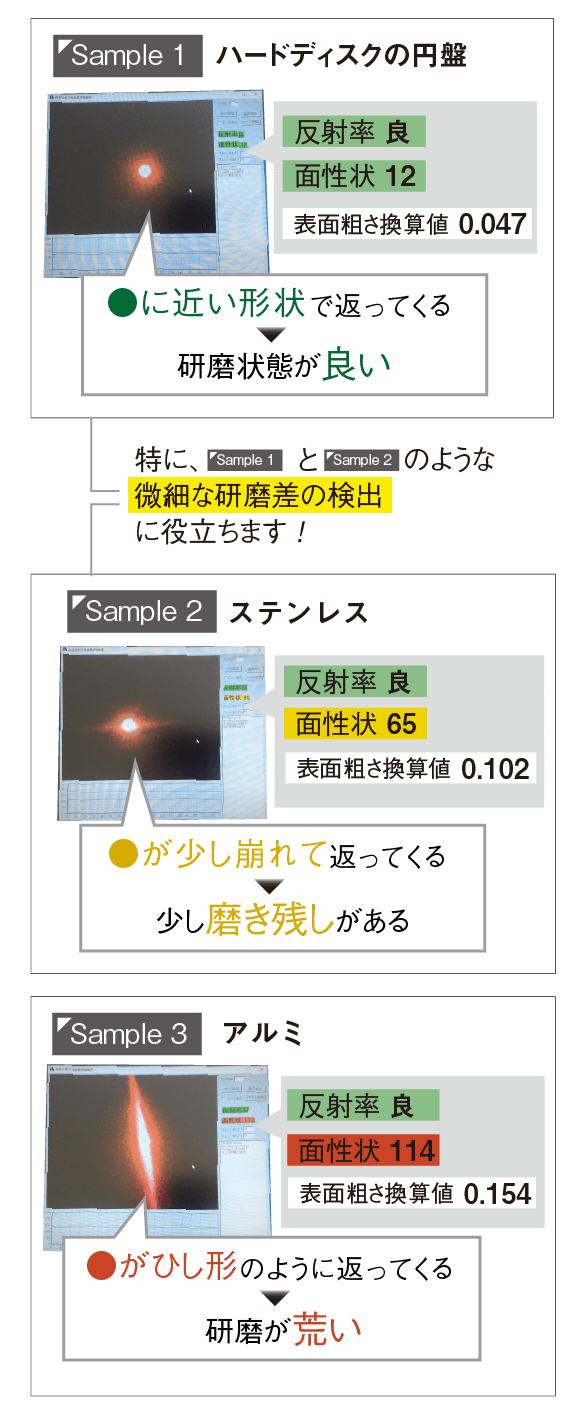
この度、高品位の研磨レベルを簡単に調べることが出来る、
【研磨加工検査装置 LIMA01】のデモ機貸し出しを開始いたしました。

ご希望のお客様にはデモ機を1週間、無料で貸し出しさせていただきますので
などのような不安や疑問も解消できて安心です。
お問い合わせフォームの【本文】、またはFAXに「研磨加工検査装置 デモ機無料貸し出し希望」とお書き添えの上、
以下の項目を記入いただきご連絡ください。
*は必須項目です
\ 研磨加工検査装置は、「高品質の研磨加工ができているかいないか」を検査できる装置です /

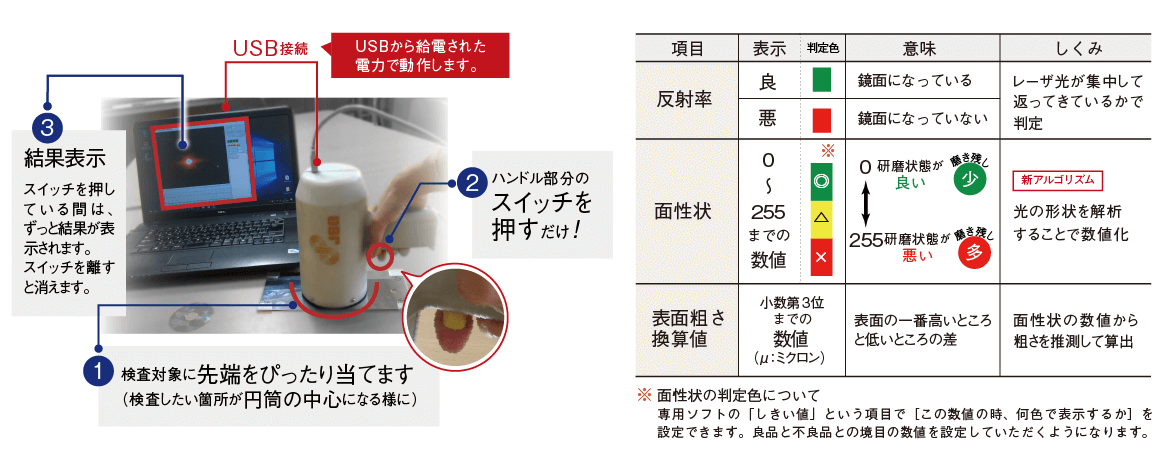
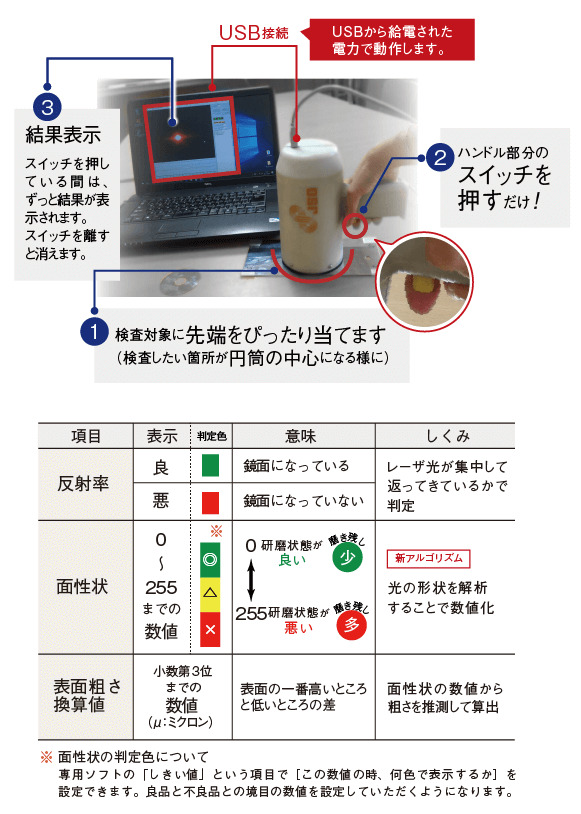
※現段階の仕様です。ご質問・ご要望などございましたらお問い合わせください。
▼ 操作デモ動画はこちら
カタログのダウンロードや製品を詳しく知りたい方は製品ページをご覧ください
研磨加工検査装置の製品ページへ
*** *** *** *** *** *** *** ***
2018年も残すことあとわずかとなってまいりました。
色々な現場でお役に立てる製品開発に、
今年最後まで、また来年も精進し邁進してしていきたいと思います。
今後もどうぞよろしくお願いいたします。
*** *** *** *** *** *** *** ***

12月に入り、広島も少しずつ寒くなってまいりました。
平素は格別のお引立てを賜り誠にありがとうございます。
年末年始の休業日が決定いたしましたのでお知らせさせていただきます。
休業中はご迷惑をおかけいたしますが、
何とぞご了承のほどよろしくお願い申し上げます。

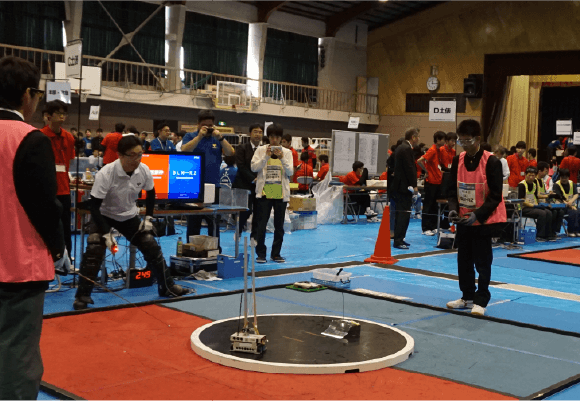
弊社が基板やソフトなどを支援させていただいております、広島県立広島工業高等学校さんが今年もロボット相撲大会へ出場されるとのことでWeb管理人・池本が見学に行って参りました。

【第30回ロボット相撲大会(高校生の部) 中国・四国大会】
せっかくなのでその様子を詳しくお伝えしようと思います!
今年は中国大会と四国大会が合わさってひとつの「中国・四国大会」となりました。
また12月15-16日に開催される【全日本ロボット相撲全国大会2018】は、海外公認大会上位の方を招致して “世界大会” という形で開催されるようです(場所は両国・国技館)。
▲創立が「大正9年」と歴史のある学校
元々予定されていた9月30日は台風24号の影響で延期となり、約1か月後の開催となりました。
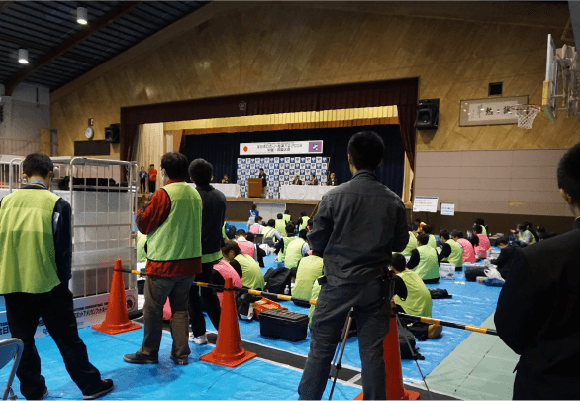
今まで工業系とは無縁だった私にとって工業高校さんへ足を踏み入れるのは初めてのこと。ドキドキしながら体育館へ。
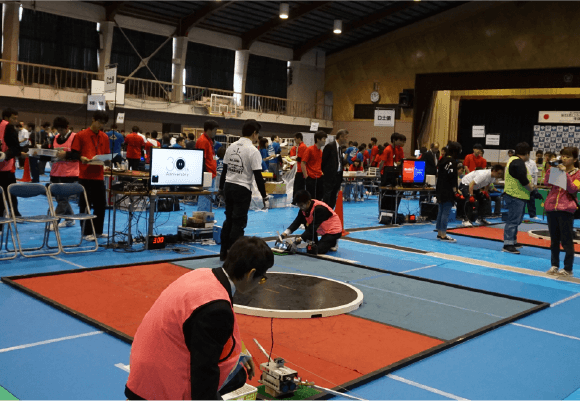
会場には「A土俵」~「D土俵」まで4つの土俵があり、それぞれの土俵で同時に試合が行われます。
危険なので土俵まわりは選手や関係者以外の人は入れないように規制されていました。

▲体育館入口から入ったところ

▲会場の様子
今年の中四国大会へのエントリーは全部で177台、そのうち高校生の部は36台とのこと。
ピンクのゼッケンがラジコン型、緑のゼッケンが自立型の選手です。
▲ステージ側奥の方は、出場者だけが入れる荷物置き場・控え場になっています。
会場の端では、お子さんも参加できるプログラミング体験教室も開かれており、数組のお子さんが親御さんと一緒に参加されて楽しんでいらっしゃいました。
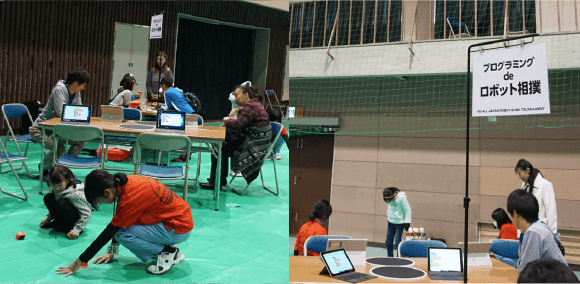
▲教材ロボットのプロロ(Proro)を使ったプログラミング体験
それでは早速ですが試合の様子をご紹介!
ラジコン型【BLM-R2】を操作するのは、県工3年生・三岳(みつたけ)くん。<土俵:青側>

▲まずは両者、立礼します
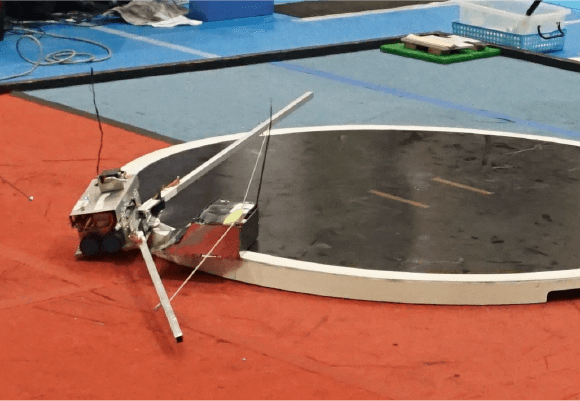
▲相手のロボットはアームが長い!スタート前に規格内のサイズ(幅・奥行20cm以内、重さ3Kg)に収まっていれば高さは自由なのでOKなんだそう
ハプニングなどがあり仕切り直したりと、試合開始に少し時間がかかりましたが・・・
審判の
『はっけよ~い、のこった!』という掛け声の後、『ピッピッピッピッー(3・2・1・ゼロ)』という電子音で試合スタート!
▲スタート直前

▲三岳くん優勢です! 押せ押せ!あと少し

▲押せ押せ!あと少し 相手のロボットが土俵外に着いたら勝ちです
▲押し出しました!

▲やった!1本取りました!
本当に相撲と同じように『はっけよ~い・・・のこった!』で始まるのですね!
ちなみに昨年までは審判の『はっけよい のこった』の掛け声後すぐに開始されていましたが、今年からは審判の「カウントダウンタイマー」による電子音の後スタートするというルールに変更されたそうです。
掛け声では人によって違っていてフライングになってしまったり難しかったようですね。
まずは【2対1】で1勝しました!!
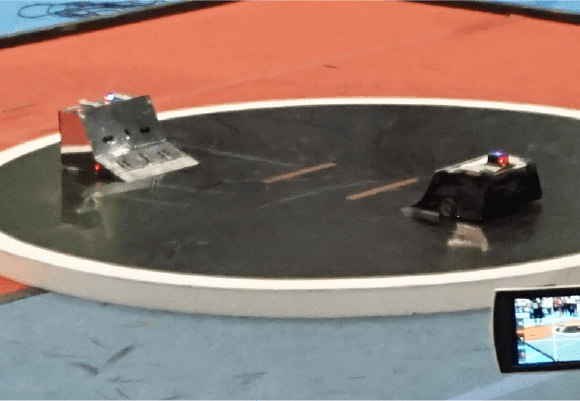
次に自立型の試合風景です!
まず、その最初の立合い方がラジコン型とは違っています。
両選手とも長い筒型で赤い光の出るポインタ、みたいなものを持って構えています。
自立型【BLM-ST】を操作するのは、県工3年生・藤本くん。<土俵:赤側>

▲試合開始直前。両者ポインタのようなものをかかげています
こちらも今年からスタート方法が変更になったそうで、
このポインタのような赤外線の光をロボットに当てておいてから、審判がリモコンを押すと2台が同時にスタートする仕組みなんだそうです。
▲赤い点をマシンに当てておきスタンバイ
以前はロボット本体のスタートボタンを押してから5秒経過後に動作を開始するルールだったそう。
自立型はセンサで近くのものに向ってくるので危険ということもあったり、フライングを無くして公正にするために、この遠隔スタート方法が採用されたとのことです。
年々進化していっているのですね!
写真を撮っていたら、スピードが速すぎてよく分からないまま終わってしまいました・・。

▲あっという間にロボットは土俵の外へ・・・
先生曰く、強豪の四国・観音寺高校が対戦相手だったそうです。
残念ながら初戦で敗れてしまいました。
生徒さんを指導されていらっしゃる広島県立広島工業高等学校 電気科 の住吉先生。

▲優しい雰囲気の住吉先生と生徒さん
初めて見るのでよく分からない私の沢山の質問にも、丁寧に教えてくださいました。

▲生徒さんに説明しているシーン
『2年生は電気工事士の資格取得もあるため、なかなかこっち(ロボット相撲)の方へ注力できないんですよ。』
とのこと。
ですので、この度も4台のうち1台が1年生なのはそういった理由とのことでした。
『ラジコン型と自立型、どちらが初心者には作りやすいのですか?』との質問に、
『ラジコン型の方が作り方はシンプルかもしれないですね。』と。自立型は相手のマシンを認識するセンサなどが必要ですがそれが要らないから、と説明していただきました。なるほど!
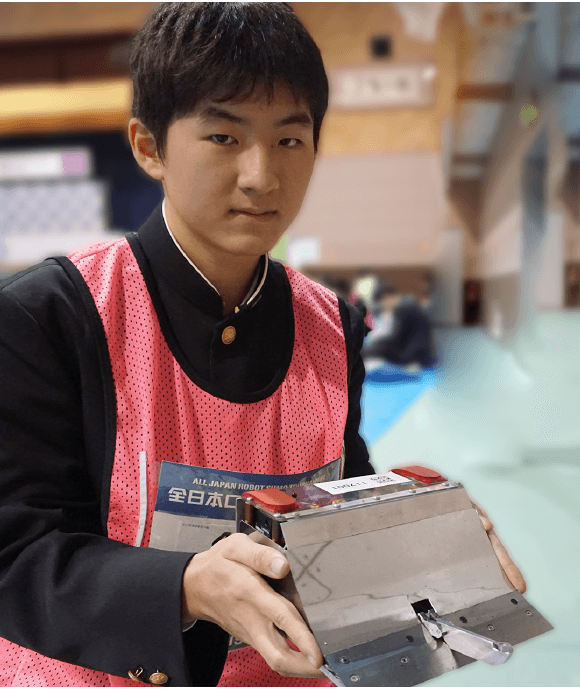
■ ラジコン型【BLM-R2】
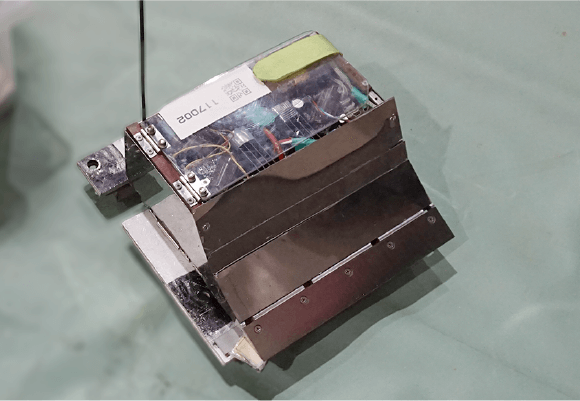
■ ラジコン型【KK-MAX】
3kg以内と聞いていたので、“ちょうど新生児くらいかな?” と思っていましたが、実際持たせていただくと見た目のせいか?赤ちゃんよりズシッと重く感じました(笑)
先輩から受け継いだ数台のロボットを上級生優先で担当を決めていき、毎年それぞれ改良していくそうです。
惜しかった三岳くんへ試合後にインタビューしてみました。
『最後の試合の敗因は何ですか?』の質問に、
『1本目に、相手が右側から攻めてきたので2本目の時は力を出せるように正面同士でぶつかれるように考えた(置いた)けれど、相手によけられてしまった』とのこと。
ラジコン型ならではの話ですね。
ラジコン型は操作する側の判断力も必要なところが、自立型とはまた違った面白さなのかなと感じました。
▲こちらの三岳くんは、一昨年の1年生の時にはラジコン型で準優勝!すでに【電気工事士 1種】の資格試験も合格されているそうです!
3年生・下道(しもみち)くんには「一番大変だったこと」を訊ねてみました。
『曲がりたくないのに曲がってしまう』のが大変だったそうです。
試合の1週間前からやっと真っすぐに行くようになってくれたこと、磁石を増やして対応したことなど話してくれました。
▲こちらの下道くんは、電気科ではなく実は建築科!プライベートではドローンを飛ばしたりしているそうで、一昨年の1年生の時にはラジコン型で優勝されています!
今年は基板が何度も壊れたりの中での出場で、残念ながら全国大会への切符は手にできませんでしたが、この大会で努力したことや自身で考えたことはこれからにつながるのではないかと思います。
県工の生徒さん、しっかりとされていて礼儀正しかったです。
『出口が就職という “覚悟” はできていると思います』と先生はおっしゃっていました。
みなさんの将来が楽しみですね!
余談ですが、ロボット同士がぶつかり合って部品が飛び散る場面を何度も目にしました。想像していたより激しく、ルールにあるように「ゴーグル」や「手袋」が本当に必須なんだなと思いました。

▲試合の度に、削れた土俵を綺麗にする場面
P.S.
相撲ロボットといえば、弊社には「第6回ロボット相撲大会」の賞状が飾ってありますが・・この機会にどんなロボット(ラジコン型?自立型?)を作ったのかなどを、また改めて訊ねてみたいと思います。
→『自立型』だそうです!当時の土俵は磁石ではなく、「吸引型」の相撲ロボットを作ったとのこと。ロボットの写真は残って無さそうで残念です。(後に追記)
受賞暦のページはこちら
******************
日本システムデザイン株式会社は、
今後も電子系教育における支援をさせていただくことで
「組み込み技術力」の底上げを図るとともに
社会貢献に尽力してまいります
******************
先日の10月10日(水)に
広島県中小企業団体中央会「ものづくり連携倶楽部ひろしま」様の
【第8回講演会・企業交流会】に参加させていただきました。
講演が2社、プレゼンテーションが2社、その後交流会という内容でしたが、
その「プレゼンテーション」の部門で、弊社の技術を紹介する機会をいただきました。

弊社からは「普段はCADを操っている技術者、馬場」が登壇!
タイトルは【レーザー光による様々な検査装置の製品開発】です。
プレゼンの時は用意していた写真や動画が思っていたように動かず、手順通りにはいかなかった場面もあったようですが、
・開発事例(ものづくり補助金で開発したものも含む)
・弊社が得意なレーザーを使った画像処理・センシング技術
などについて、直に多くの方へ披露できる貴重な場をいただいて光栄でした。
お聴きいただいた皆さま、誠にありがとうございました。
[プレゼンの様子①]
はじめのスライド
[プレゼンの様子②]
JSDについてのスライド
プレゼン中の馬場

展示ブースには、研磨加工検査装置・倒立振子型ラジコン

上の方には「交流会」の看板

交流会の様子

交流会の様子(乾杯!)

研磨加工検査装置について説明中!

こうやって「押す」だけで研磨加工面の研磨状態を数値化!
弊社は社員数9名と小さな会社ながら、付加価値の高い「組み込みシステム(検寸装置・検査装置など)」を作る技術があります。
そして、弊社は何よりハード・ソフト・メカのほとんどを自社で自作することができるので、無駄がありません。
工場などのライン検査現場、研究の分野などご要望がございましたら、ぜひお気軽にご連絡ください!
▲レーザー検査装置の動き
▲最新の3DCADによる設計で、部品同士が干渉する設計ミスが圧倒的に少なくなります
▲倒立振子の基礎技術、自律走行ロボット(倒立振子型)GENT
▲レーザ検査装置内部の仕組み
▲研磨加工検査装置の操作デモ
▲ピッキング装置