平素は格別のお引立てを賜り誠にありがとうございます。
夏季休業期間が決定いたしましたのでご連絡させて頂きます。
休業日 2019年8月10日(土)~2019年8月18日(日) まで
休業中はご迷惑をおかけいたしますが、
何とぞご了承のほどよろしくお願い申し上げます。







平素は格別のお引立てを賜り誠にありがとうございます。
夏季休業期間が決定いたしましたのでご連絡させて頂きます。
休業中はご迷惑をおかけいたしますが、
何とぞご了承のほどよろしくお願い申し上げます。

本日は昔の開発について少しご紹介!
技術のエキスパート・井谷のデスクを覗いてみると・・・
今度は大きな箱のようなものが!
こちらは、だいぶ昔に開発した
【1軸加振機のコントローラ】 です。

およそ17年ぶりに、壊れて修理のために戻ってきたそうです。
「加振機」、つまり故意に振動を起こすことで何をするのでしょう?
答えは「車のシート」の
という用途に使われる、ということなんだそうです。
160Kgくらいは積載可能だとか。
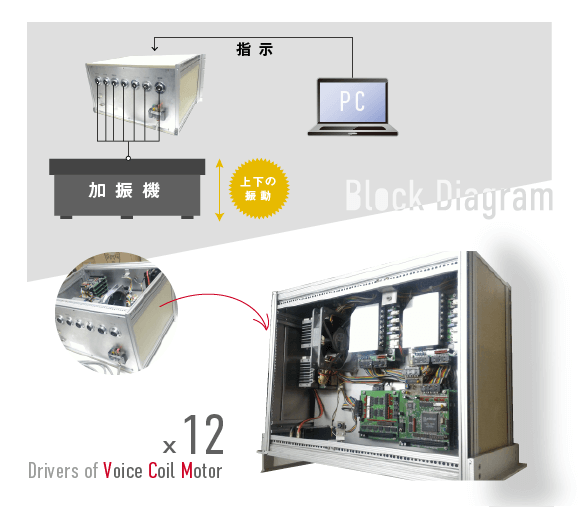
こちらは、
『1軸』 = 上下(Z軸)縦方向だけのシンプルな加振動ですが、
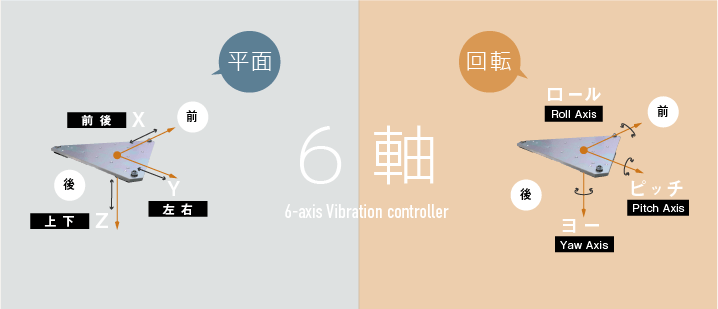
『6軸』という複雑な振動を起こすコントローラも過去開発しています。
詳しくは、こちらもご覧ください。
↓
【代表者挨拶 > 18の特徴的な開発】
8.振動試験装置用6軸加振コントローラ
▲ クリックで画像を拡大できます
新しい開発はこちら
【位相シフト×空間コードで3次元位置をはじき出す】 >
日本システムデザイン(株)の沿革はこちら
マイクロマウスから始まりました >

工学博士であり「半導体レーザ・光ファイバーを活用した計測装置の開発」等々に精通している岡田氏に技術的な面からアドバイスいただくことで、今後ますます技術力を強化・進化させ、より世の中に役に立つ新しい製品を開発していけたらという意向でございます。
今後ともどうぞよろしくお願い申し上げます。

2005年より産業技術総合研究所の産学官連携コーディネータ、定年退職後、公益財団法人のコーディネータを経て2014年より産総研中国センターにおいて産学官連携支援活動に従事。
2019年から当社の技術アドバイザー。
当社の麥田社長、井谷氏とは1985年の会社設立以来、ユニークな発想に基づく新規な計測装置の開発に関して共同研究を行っており、複合視覚センサー、移動ロボット、ピッキングロボットシステム、レーザ傷検査装置などの様々な革新的な装置を共同開発してきた。
*** *** *** *** *** *** *** *********
産総研との共同開発については、こちらで公開中です。

*** *** *** *** *** *** *** *********

本日は新しい開発の様子を少しご紹介!
技術のエキスパート・井谷のデスクを覗いてみると・・・
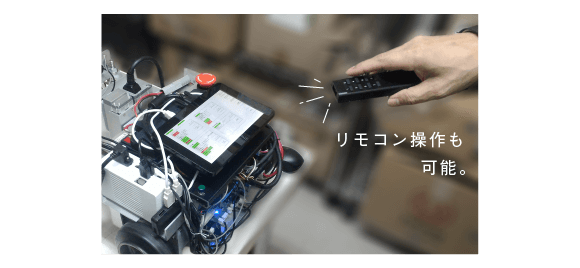
何やら、赤いレーザの光を発している車のようなロボットが。
“溶接の欠陥を検査する”ために
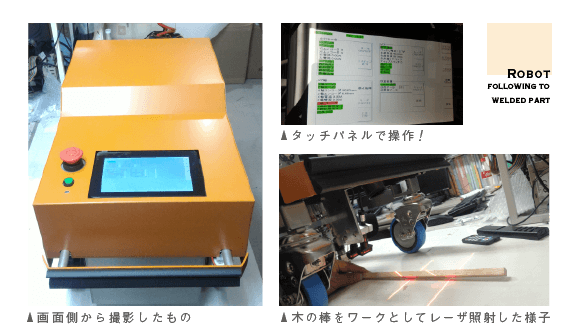
「溶接面をトレース(追従)して走る」ロボットを開発中でした!
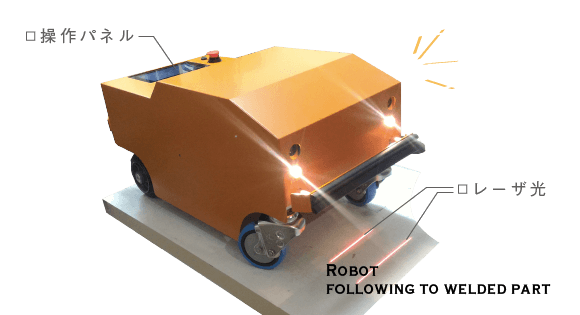

木の棒を動かした方向に、ロボットが寄ってきていますよね。
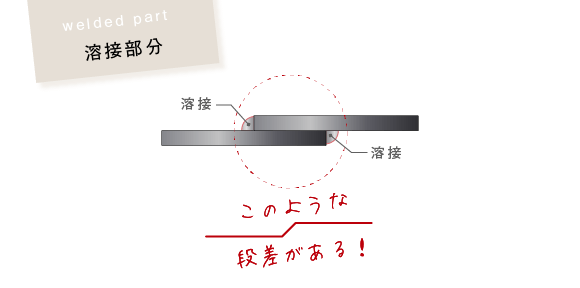
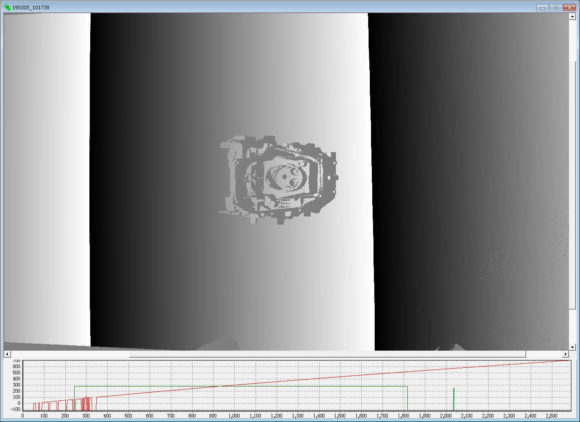
金属の溶接部分は下の図のように重なり合っていて必ず【段差】があります。
“レーザ照射&画像処理”により、その段差の中心を見つけ、なぞっていく仕組みを開発したそうです。
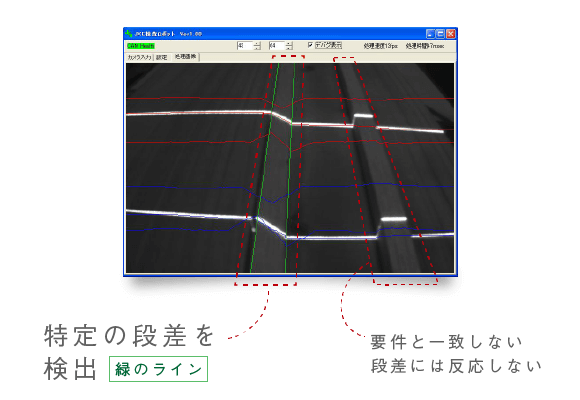
▼【参考】段差検出時の画像処理画面(緑色のラインが段差を検出した箇所)
画像処理に関連する他の記事もご覧ください
【位相シフト×空間コードで3次元位置をはじき出す】 >
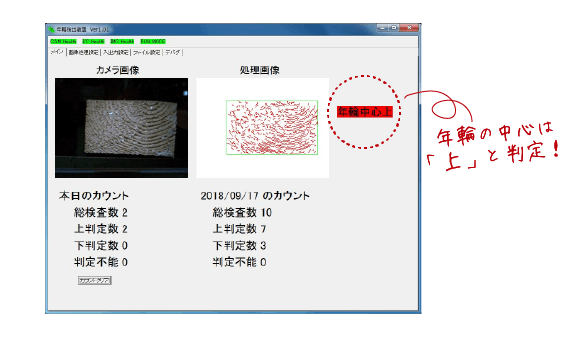
【年輪方向判定装置 稼働スタート!】 >

平素は格別のお引立てを賜り誠にありがとうございます。
2019年のゴールデンウィーク休業日が決定いたしましたので、お知らせいたします。
休業中は大変ご迷惑をおかけいたしますが、
何とぞご了承のほどよろしくお願い申し上げます。

のご紹介です。
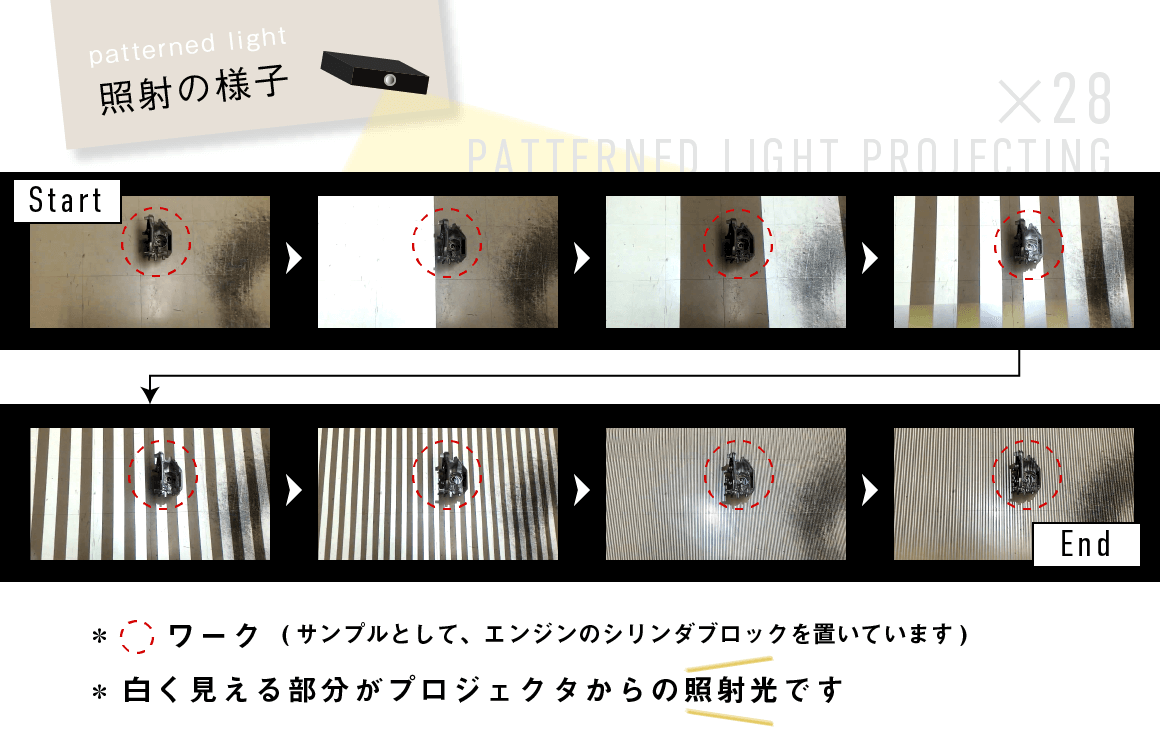
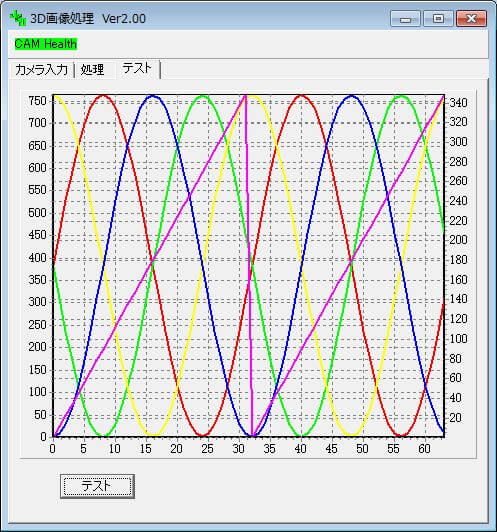
まずは、こちらの動画をご覧ください!(※眼がチラチラするのでお気をつけください)
パラパラと連続で光が照射されていますよね。
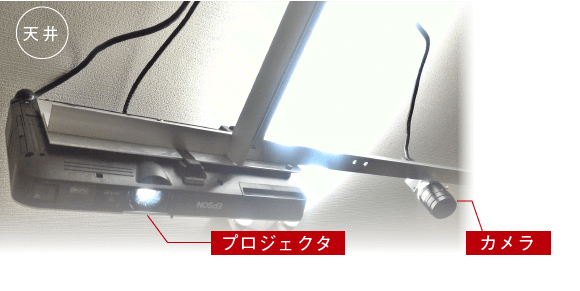
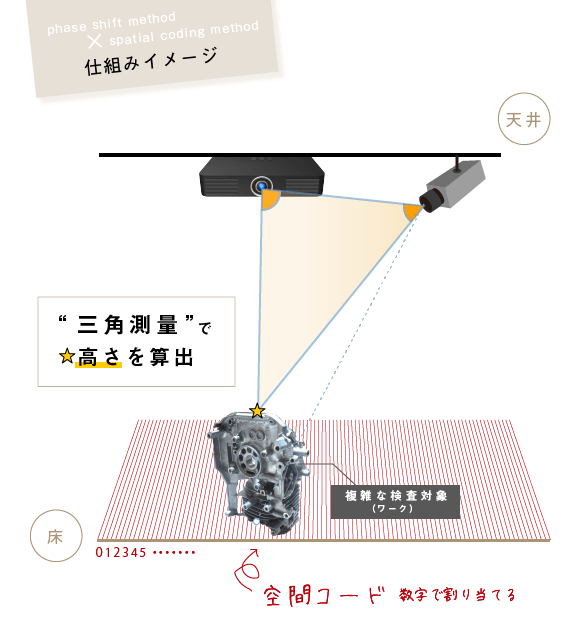
ワークの上部には、カメラとプロジェクタがあり、全部で「28パターン」の光を照射してそれをカメラで撮影しているそうです。それから画像処理をして高精度な3次元位置を特定します。
★【位相シフト法】だけだと → 精度は良いけれど高さ情報が分からず、
★【空間コード法】だけだと → 高さは分かるけれど精度があまりよくない、とのこと。
ですがこの2つの方法を組み合わせることでお互いの短所を補い合うことが出来ます。
少し仕組みについてご紹介しますと、パターン照射してそれをビット毎に割り当てることで空間コードを割り出し「三角測量」を使って高さを導きます。
よって精度の高い「位置(X、Y、Z座標)」と「傾き(ロール・ピッチ・ヨー)」までを算出できるそうです。
以上、新しい開発のご紹介でした。
[高精度3次元画像処理]について紹介したスライド資料はこちらからご覧いただけます。
日本システムデザインでは、ハード(基板)の設計からメカ制作までまるっと制作できます。
オーダーメイドなのに小回りがきくから、例えば【基板を小さく】【市販物よりコストカット】などお客様に好評いただいております。
『こんな開発はできるの?』や
『コストはどのくらいかかる?』などご質問・ご要望などをぜひお気軽にお聞かせください!

ちょうど「空間コード法」が専門家の間で言われ始めた頃だそうで、「製造ラインでピッキングを行うために」空間コード法を使って開発したそうです。
当時は道具(カメラなどメカ)も今より性能が良くはなかったですし、今よりも難しい開発だったかも・・?
マイクロマウスって何?という方はこちらもぜひご覧ください!

日本システムデザイン株式会社は、
2019年2月1日で34周年を迎えました。
これも、ひとえに皆様のおかげであり、深謝申し上げます。
(皆様とは、お客様、ご支援・ご協力いただいた方々、株主様、地域の皆様など、関わりのあった方すべてでございます)
35年目もどうぞよろしくお願いいたします。
*** *** *** *** *** *** *** *********
これから、少子高齢化を迎える日本では、
ますます「ロボットが必要となる時代」がやって来ると思われます。
その時代の中で、オーダーメイドの組み込みシステムを提供することで
社会に貢献することができれば幸いに存じます。
*** *** *** *** *** *** *** *********
P.S
これを機に、日本システムデザインの歴史となる資料を掘り起こしましたので公開させていただきます!マイクロマウスヨーロッパ大会(1984年)の貴重なフィルム写真を撮影したものもあります。 By Web管理人
***** 懐かしい写真を公開!(第2弾) *****
クリックで画像が拡大されます。
ぜひご覧ください
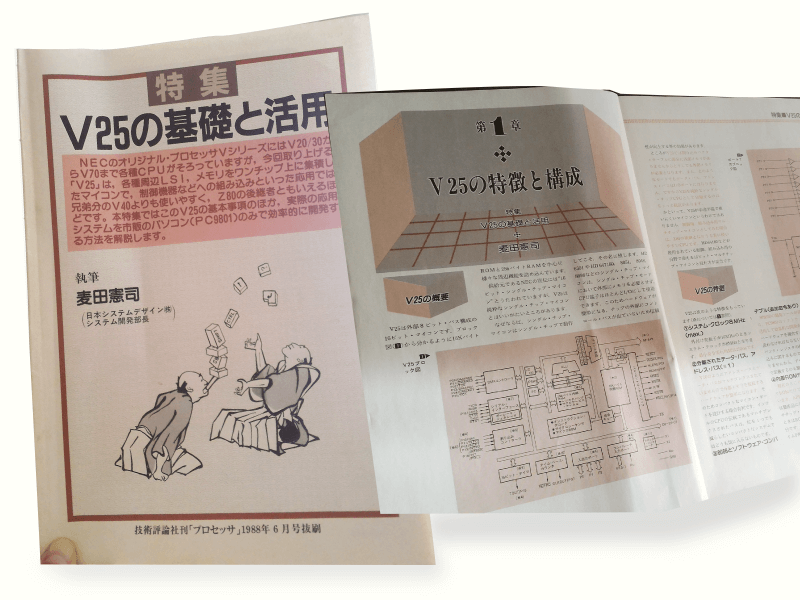
1988年以降に製作していた【V25 CPUボード】の説明本
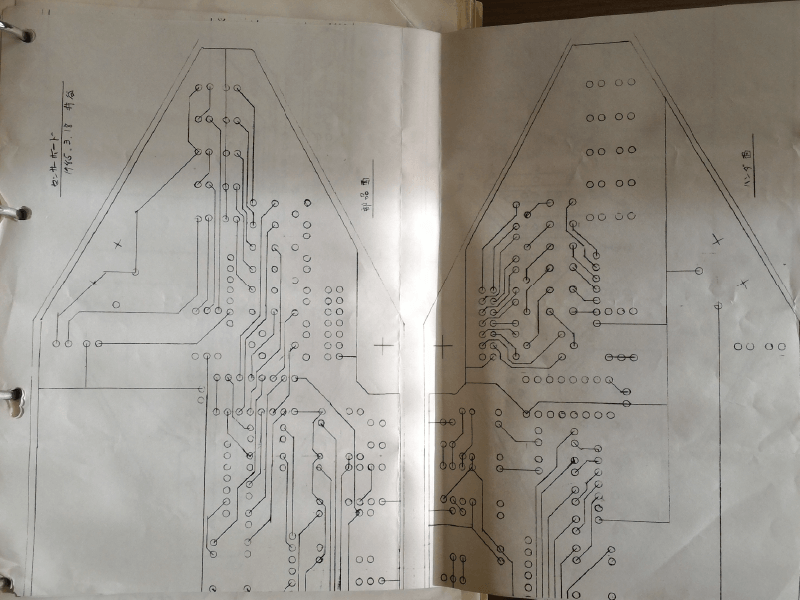
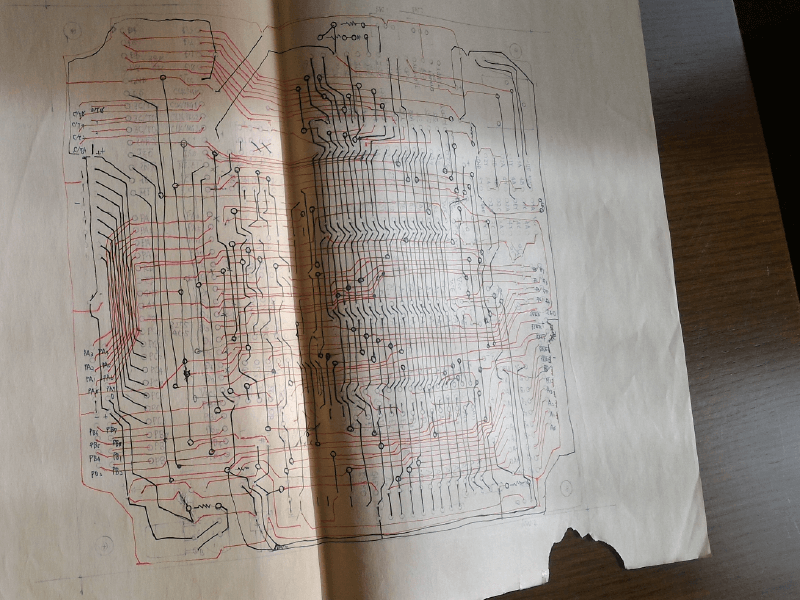
今は無い“手書き”の基板(センサ)設計書。
1984年ヨーロッパ大会のチーズ型トロフィーは可愛い♡

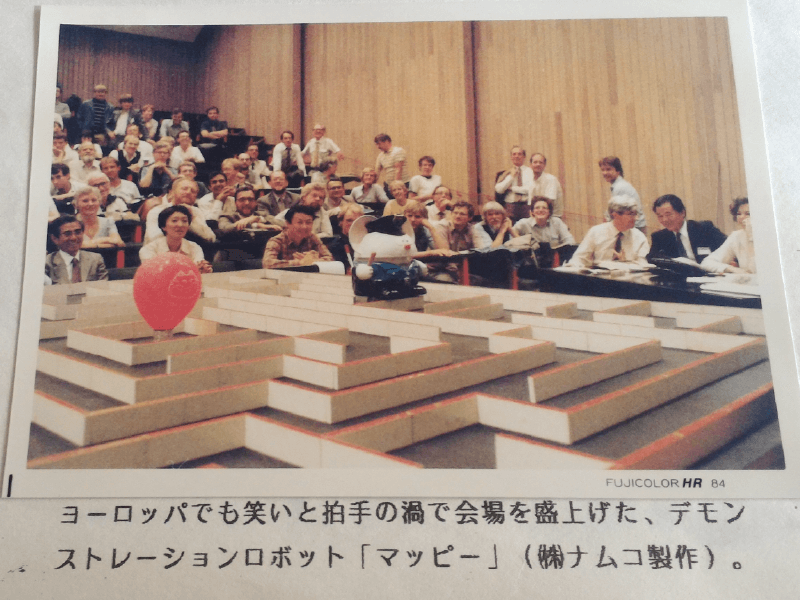
1984年ヨーロッパ大会表彰式の様子。コペンハーゲン市長も出席されたそう。

ナムコ製『マッピー』は会場を盛り上げたのだそう!
[1984年ヨーロッパ大会]
フィンランドチームの『Microsaurus』が見事ゴールしたシーン。
マイクロマウスの小冊子(’88 3月)。井谷がジャイロやNORIKOキットについて説明。
手書き!のボード設計図
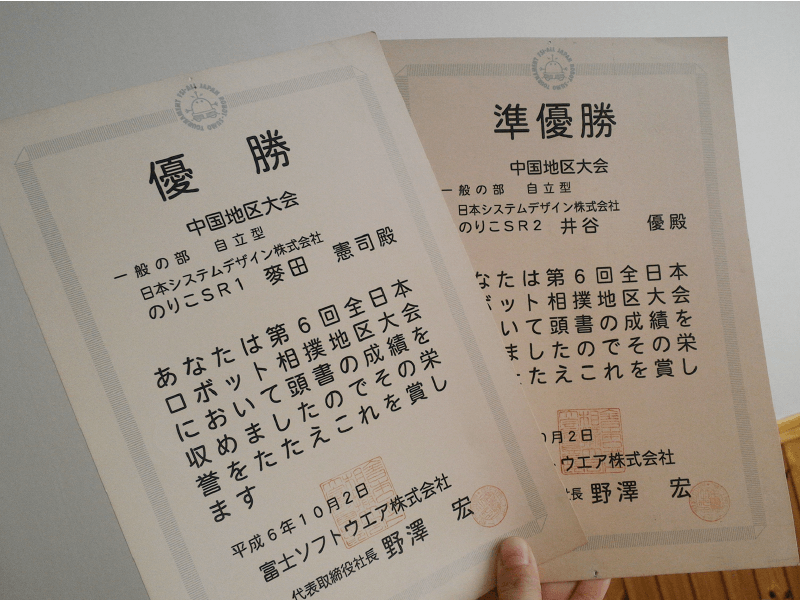
第6回ロボット相撲地区大会の賞状 この全国大会では【科学技術庁長官賞】を受賞!
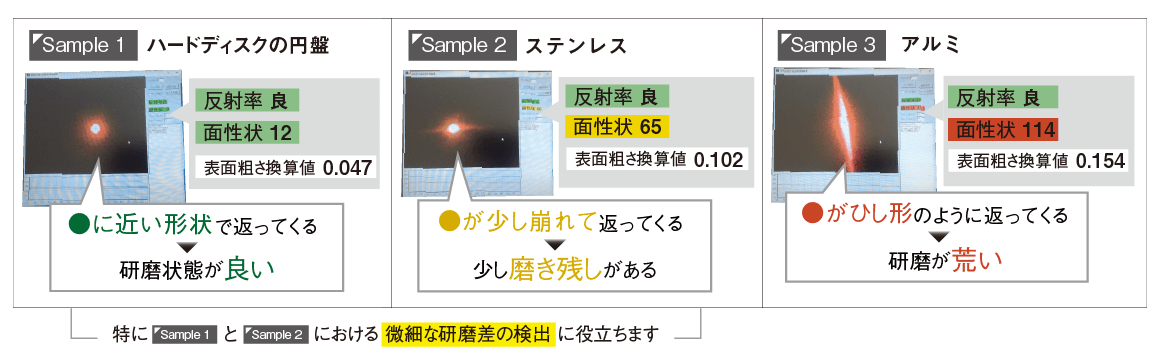
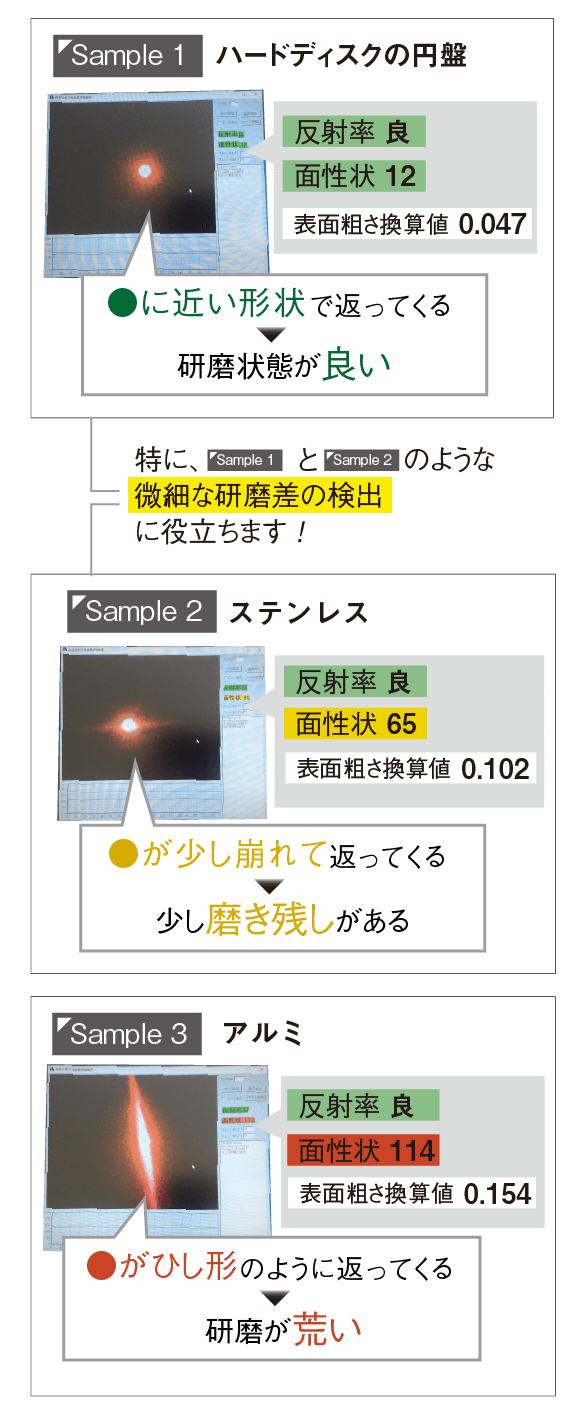
この度、高品位の研磨レベルを簡単に調べることが出来る、
【研磨加工検査装置 LIMA01】のデモ機貸し出しを開始いたしました。

ご希望のお客様にはデモ機を1週間、無料で貸し出しさせていただきますので
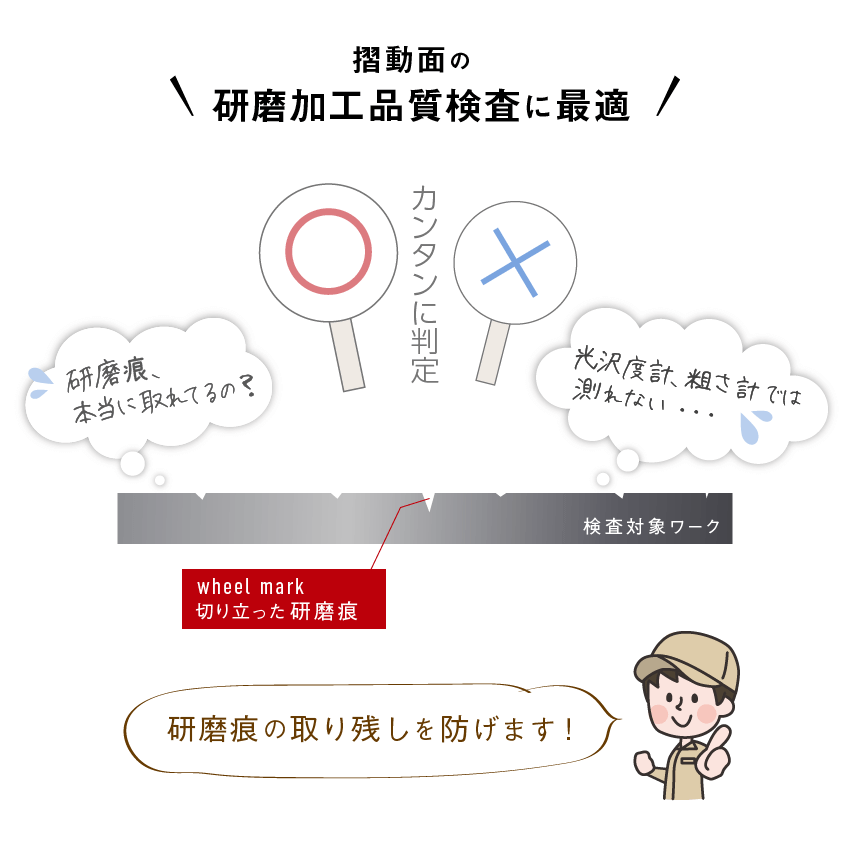
などのような不安や疑問も解消できて安心です。
お問い合わせフォームの【本文】、またはFAXに「研磨加工検査装置 デモ機無料貸し出し希望」とお書き添えの上、
以下の項目を記入いただきご連絡ください。
*は必須項目です
\ 研磨加工検査装置は、「高品質の研磨加工ができているかいないか」を検査できる装置です /

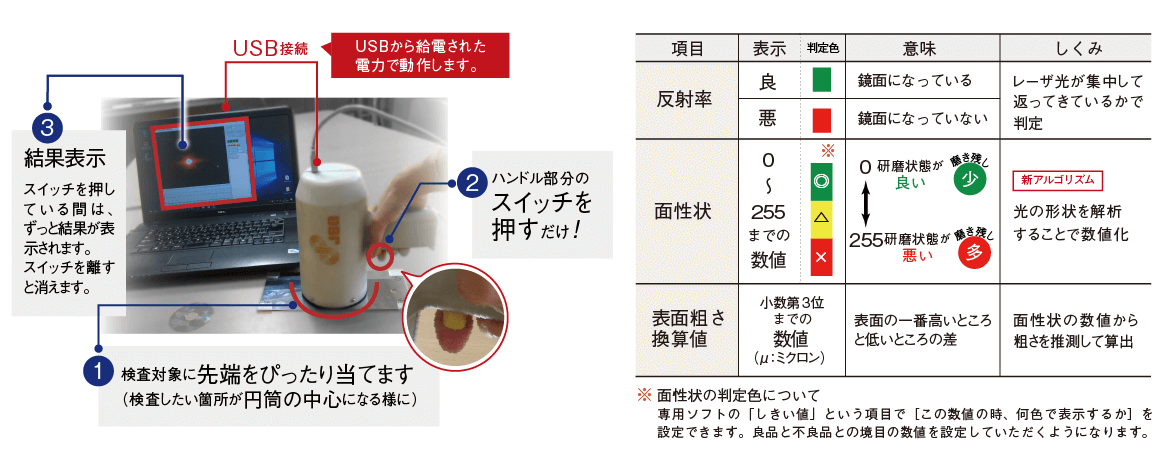
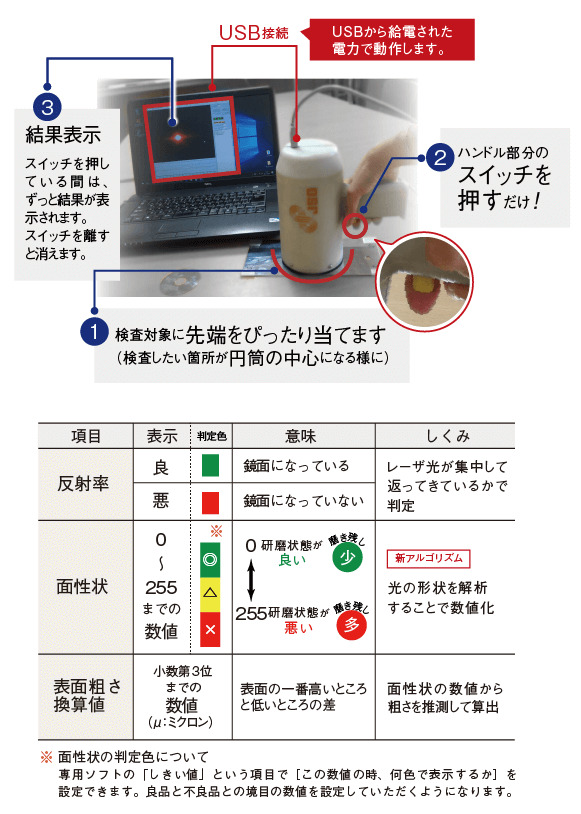
※現段階の仕様です。ご質問・ご要望などございましたらお問い合わせください。
▼ 操作デモ動画はこちら
カタログのダウンロードや製品を詳しく知りたい方は製品ページをご覧ください
研磨加工検査装置の製品ページへ
*** *** *** *** *** *** *** ***
2018年も残すことあとわずかとなってまいりました。
色々な現場でお役に立てる製品開発に、
今年最後まで、また来年も精進し邁進してしていきたいと思います。
今後もどうぞよろしくお願いいたします。
*** *** *** *** *** *** *** ***

12月に入り、広島も少しずつ寒くなってまいりました。
平素は格別のお引立てを賜り誠にありがとうございます。
年末年始の休業日が決定いたしましたのでお知らせさせていただきます。
休業中はご迷惑をおかけいたしますが、
何とぞご了承のほどよろしくお願い申し上げます。

(2020年9月4日追記)
現在、正答率は99.56%で稼働しています!

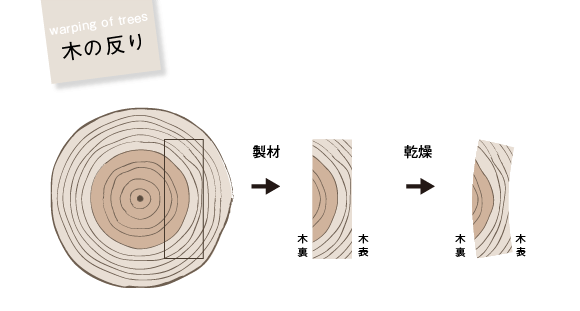
その中で正答率を下げる原因が【鋸目(のこめ)】であるということが分かりました。
丸のこでカットした鋸の跡が照明の影となり、年輪と鋸目の区別がつかなくなっているものがあったのです。
そこで、当初斜めから1方向で照らしていた照明をやめて2方向から照らすことで、できるだけ「鋸目の影」ができないような改善対応をご提案。
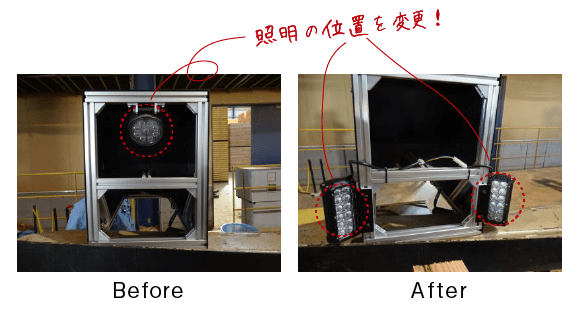
★現在は、照明の改善対応により
97.76% から
↓
99.10% まで正答率を上げた状態で稼働しています。
↓
(2020年9月4日追記)パラメータの調整により、現在正答率は99.56%で稼働しています!
********************************
同じような悩みや自動化・省人化を検討されている現場の方で
ご質問・ご相談などありましたら、お気軽にご連絡ください。
既存の製品についてはこちらもご覧ください。
受託開発がほとんどであり非公開の製品も多くあります。
製品として公開しているものは少ないですが、実際は沢山の製品を開発しております!
![[ダウンロード]スライド資料はこちらから【位相シフト法×空間コード法による「高精度3次元画像処理」】](https://jsdkk.com/home/wp-content/uploads/2019/03/c428256863e8a75fa70fc0bac187129a.png)